前者是计算透视映射矩阵,后者是计算单应性矩阵。
当是逆透视的时候,前者可以认为是平面的单应性矩阵。
?
?



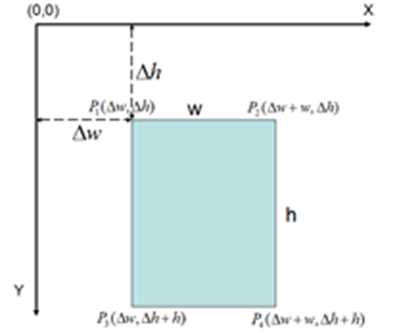
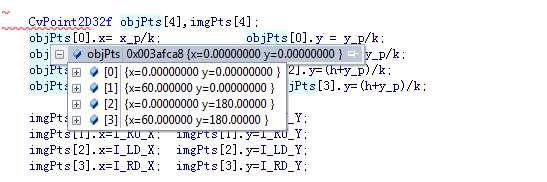
如上面的图所示:
矩形宽度为300
矩形高度为900
比例值为:5(这个是输出后的像素与距离的对应关系)
横向偏移距离:0
纵向偏移距离:0
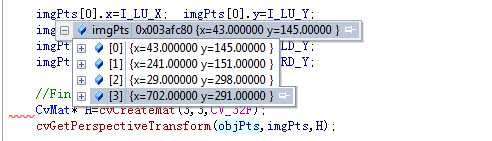

右边图像的像素:200*5cm = 750 60*5 = 300
对于右图为啥会有下面一部分,是因为我自己定义了它的大小。下面是我们只定义矩形框的图像:

?
现在我总结一下标定的意思:
参考资料:
?
在用逆透视进行标定的时候,其实H(单应性矩阵里面已经有内参在里面了)。
?
从目前来看,假如只想要知道某个对应关系,摄像机可以不做标定。(求内参之类的)
原文:http://www.cnblogs.com/zhuxuekui/p/4890756.html