http://blog.csdn.net/sunyubo458/article/details/6090946
了解linux的内存模型,或许不能让你大幅度提高编程能力,但是作为一个基本知识点应该熟悉。坐火车外出旅行时,即时你对沿途的地方一无所知,仍然可以到达目标地。但是你对整个路途都很比较清楚的话,每到一个站都知道自己在哪里,知道当地的风土人情,对比一下所见所想,旅程可能更有趣一些。
类似的,了解linux的内存模型,你知道每块内存,每个变量,在系统中处于什么样的位置。这同样会让你心情愉快,知道这些,有时还会让你的生活轻更松些。看看变量的地址,你可以大致断定这是否是一个有效的地址。一个变量被破坏了,你可以大致推断谁是犯罪嫌疑人。
Linux的内存模型,一般为:
|
地址 |
作用 |
说明 |
|
>=0xc000 0000 |
内核虚拟存储器 |
用户代码不可见区域 |
|
<0xc000 0000 |
Stack(用户栈) |
ESP指向栈顶 |
|
|
↓
↑ |
空闲内存 |
|
>=0x4000 0000 |
文件映射区 |
|
|
<0x4000 0000 |
↑ |
空闲内存
|
|
|
Heap(运行时堆) |
通过brk/sbrk系统调用扩大堆,向上增长。 |
|
|
.data、.bss(读写段) |
从可执行文件中加载 |
|
>=0x0804 8000 |
.init、.text、.rodata(只读段) |
从可执行文件中加载 |
|
<0x0804 8000 |
保留区域 |
|
很多书上都有类似的描述,本图取自于《深入理解计算机系统》p603,略做修改。本图比较清析,很容易理解,但仍然有两点不足。下面补充说明一下:
1. 第一点是关于运行时堆的。
为说明这个问题,我们先运行一个测试程序,并观察其结果:
运行后,输出结果为:
main=0x8048404 print=0x8048324
first=0xbfcd1264
p0=0x9253008 p1=0xb7ec0008 p2=0x97ebf008 p3=0x57ebe008
main和print两个函数是代码段(.text)的,其地址符合表一的描述。
l first是第一个临时变量,由于在first之前还有一些环境变量,它的值并非0xbfffffff,而是0xbfcd1264,这是正常的。
l p0是在堆中分配的,其地址小于0x4000 0000,这也是正常的。
l 但p1和p2也是在堆中分配的,而其地址竟大于0x4000 0000,与表一描述不符。
原因在于:运行时堆的位置与内存管理算法相关,也就是与malloc的实现相关。关于内存管理算法的问题,我们在后继文章中有详细描述,这里只作简要说明。在glibc实现的内存管理算法中,Malloc小块内存是在小于0x4000 0000的内存中分配的,通过brk/sbrk不断向上扩展,而分配大块内存,malloc直接通过系统调用mmap实现,分配得到的地址在文件映射区,所以其地址大于0x4000 0000。
从maps文件中可以清楚的看到一点:
|
00514000-00515000 r-xp 00514000 00:00 0 00624000-0063e000 r-xp 00000000 03:01 718192 /lib/ld-2.3.5.so 0063e000-0063f000 r-xp 00019000 03:01 718192 /lib/ld-2.3.5.so 0063f000-00640000 rwxp 0001a000 03:01 718192 /lib/ld-2.3.5.so 00642000-00766000 r-xp 00000000 03:01 718193 /lib/libc-2.3.5.so 00766000-00768000 r-xp 00124000 03:01 718193 /lib/libc-2.3.5.so 00768000-0076a000 rwxp 00126000 03:01 718193 /lib/libc-2.3.5.so 0076a000-0076c000 rwxp 0076a000 00:00 0 08048000-08049000 r-xp 00000000 03:01 1307138 /root/test/mem/t.exe 08049000-0804a000 rw-p 00000000 03:01 1307138 /root/test/mem/t.exe 09f5d000-09f7e000 rw-p 09f5d000 00:00 0 [heap] 57e2f000-b7f35000 rw-p 57e2f000 00:00 0 b7f44000-b7f45000 rw-p b7f44000 00:00 0 bfb2f000-bfb45000 rw-p bfb2f000 00:00 0 [stack] |
2. 第二是关于多线程的。
现在的应用程序,多线程的居多。表一所描述的模型无法适用于多线程环境。按表一所述,程序最多拥有上G的栈空间,事实上,在多线程情况下,能用的栈空间是非常有限的。为了说明这个问题,我们再看另外一个测试:
运行后,输出结果为:
first=0xbfd3d35c
(0xb7f2cbb0): first=0xb7f2c454
(0xb7f2cbb0): p0=0x84d52d8 p1=0xb4c27008
(0xb752bbb0): first=0xb752b454
(0xb752bbb0): p0=0x84d56e0 p1=0xb4b26008
(0xb6b2abb0): first=0xb6b2a454
(0xb6b2abb0): p0=0x84d5ae8 p1=0xb4a25008
(0xb6129bb0): first=0xb6129454
(0xb6129bb0): p0=0x84d5ef0 p1=0xb4924008
(0xb5728bb0): first=0xb5728454
(0xb5728bb0): p0=0x84d62f8 p1=0xb7e2c008
我们看一下:
主线程与第一个线程的栈之间的距离:0xbfd3d35c - 0xb7f2c454=0x7e10f08=126M
第一个线程与第二个线程的栈之间的距离:0xb7f2c454 - 0xb752b454=0xa01000=10M
其它几个线程的栈之间距离均为10M。
也就是说,主线程的栈空间最大为126M,而普通线程的栈空间仅为10M,超这个范围就会造成栈溢出。
系统为进程分配数据空间有三种形式。
静态分配
整块静态分配空间,包括其中的所有数据实体,都是在进程创建时由系统一次性分配的(同时为UNIX称为Text的代码分配空间)。这块空间在进程运行期间保持不变。
初始化的和未初始化的实体分别放在初始化数据段和未初始化数据段(BSS)。后者和前者不同,在.o文件a.out文件里都不存在(只有构架信息),在进程的虚拟空间里才展开。
extern变量和static变量采用静态分配。
在进程创建时做静态分配,分配正文(text)段、数据段和栈空间。
正文和初始化数据是按a.out照样复制过来;未初始化数据按构架信息展开,填以0或空;栈空间的大小由链接器开关(具体哪个开关忘了)决定。
栈分配
整个栈空间已在进程创建时分配好。栈指针SP的初值的设定,确定了栈空间的大小。链接器的某个开关可以设定栈空间的大小。在进程运行期间,栈空间的大小不变。但是,在进程刚启动时,栈空间是空的,里面没有实体。在进程运行期间,对具体实体的栈分配是进程自行生成(压栈)和释放(弹出)实体,系统并不参与。
auto变量和函数参数采用栈分配。
只要压入的实体的总长度不超过栈空间尺寸,栈分配就与系统无关。如果超过了,就会引发栈溢出错误。
堆分配
当进程需要生成实体时,向系统申请分配空间;不再需要该实体时,可以向系统申请回收这块空间。
堆分配使用特定的函数(如malloc()等)或操作符(new)。所生成的实体都是匿名的,只能通过指针去访问。
对实体来说,栈分配和堆分配都是动态分配:实体都是在进程运行中生成和消失。而静态分配的所有实体都是在进程创建时全部分配好的,在运行中一直存在。
同为动态分配,栈分配与堆分配是很不相同的。前者是在进程创建时由系统分配整块栈空间,以后实体通过压栈的方式产生,并通过弹出的方式取消。不管是否产生实体,产生多少实体,栈空间总是保持原来的大小。后者并没有预设的空间,当需要产生实体时,才向系统申请正好能容纳这个实体的空间。当不再需要该实体时,可以向系统申请回收这块空间。因此,堆分配是真正的动态分配。
显然,堆分配的空间利用率最高。
栈分配和静态分配也有共性:整块空间是在进程创建时由系统分配的。但是,后者同时分配了所有实体的空间,而前者在进程启动时是空的。另外,栈上的实体和数据段里的实体都是有名实体,可以通过标识符来访问。
|
|
静态分配 |
栈分配 |
堆分配 |
|
整块空间生成 |
进程创建时 |
进程创建时 |
用一点分配一点 |
|
实体生成时间 |
进程创建时 |
进程运行时 |
进程运行时 |
|
实体生成者 |
操作系统 |
进程 |
进程申请/系统实施 |
|
生命期 |
永久 |
临时 |
完全可控 |
|
有名/匿名 |
有名 |
有名 |
匿名 |
|
访问方式 |
能以标识访问 |
能以标识访问 |
只能通过指针访问 |
|
空间可否回收 |
不可 |
不可 |
可以 |
栈溢出的后果是比较严重的,或者出现Segmentation fault错误,或者出现莫名其妙的错误。
http://blog.csdn.net/bullbat/article/details/7166736
linux使用于广泛的体系结构,因此需要用一种与体系结构无关的方式来描述内存。linux用VM描述和管理内存。在VM中兽药的普遍概念就是非一致内存访问。对于大型机器而言,内存会分成许多簇,依据簇与处理器“距离”的不同,访问不同的簇会有不同的代价。
每个簇都被认为是一个节点(pg_data_t),每个节点被分成很多的成为管理区(zone)的块,用于表示内存中的某个范围。除了ZONE_DMA,ZONE_NORMAL,ZONE_HIGHMEM以外,linux2.6.32中引入了ZONE_MOVABLE,用于适应大块连续内存的分配。
每个物理页面由一个page结构体描述,所有的结构都存储在一个全局的mem_map数组中(非平板模式),该数组通常存放在ZONE_NORMAL的首部,或者就在校内存系统中为装入内核映像而预留的区域之后。
节点
内存的每个节点都有pg_data_t描述,在分配一个页面时,linux采用节点局部分配的策略,从最靠近运行中的CPU的节点分配内存。由于进程往往是在同一个CPU上运行,因此从当前节点得到的内存很可能被用到。
管理区
每个管理区由一个zone结构体描述,对于管理区的类型描述如下
里面的英文注释已经写的很详细了。
管理区用于跟踪诸如页面使用情况统计数,空闲区域信息和锁信息等。
没有说明的地方,内核中的英文注释已经写得很清楚了。
页面
系统中每个物理页面都有一个相关联的page用于记录该页面的状态。
linux中主要的结构描述体现了linux物理内存管理的设计。后面会介绍linux内存管理的各个细节。
版权声明:本文为博主原创文章,未经博主允许不得转载。
linux内存管理建立在基本的分页机制基础上,在linux内核中RAM的某些部分将会永久的分配给内核,并用来存放内核代码以及静态内核数据结构。RAM的其余部分称为动态内存,这不仅是进程所需的宝贵资源,也是内核本身所需的宝贵资源。实际上,整个系统的性能取决于如何有效地管理动态内存。因此,现在所有多任务操作系统都在经历优化对动态内存的使用,也就是说,尽可能做到当要时分配,不需要时释放。
内存管理是os中最复杂的管理机制之一。linux中采用了很多有效的管理方法,包括页表管理、高端内存(临时映射区、固定映射区、永久映射区、非连续内存区)管理、为减小外部碎片的伙伴系统、为减小内部碎片的slab机制、伙伴系统未建立之前的页面分配制度以及紧急内存管理等等。这些在后面的具体部分会详细进行分析总结。
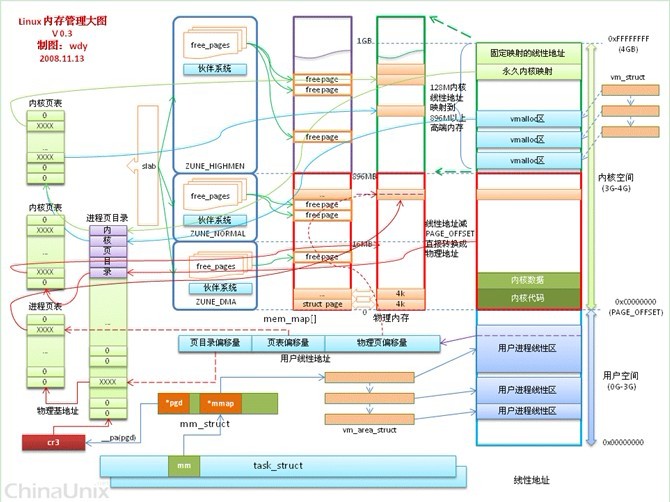
本来想自己画张图,但当我看到这张图,我决定不画了。这张图来自http://bbs.chinaunix.net/thread-2018659-2-1.html,画的很好,基本上说明了linux内存概况。
版权声明:本文为博主原创文章,未经博主允许不得转载。
http://blog.csdn.net/bullbat/article/details/7167870
linux在被bootloader加载到内存后, cpu最初执行的linux内核代码是/header.S文件中的start_of_setup函数,这个函数在做了一些准备工作后会跳转到boot目下文件main.c的main函数执行,在这个main函数中我们可以第一次看到与内存管理相关的代码,这段代码调用detect_memeory()函数检测系统物理内存
在header.S中执行下面汇编代码:
跳到boot目录下的main.c文件中
由上面的代码可知,linux内核会分别尝试调用detect_memory_e820()、detcct_memory_e801()、detect_memory_88()获得系统物理内存布局,这3个函数内部其实都会以内联汇编的形式调用bios中断以取得内存信息,该中断调用形式为int 0x15,同时调用前分别把AX寄存器设置为0xe820h、0xe801h、0x88h,关于0x15号中断有兴趣的可以去查询相关手册。下面分析detect_memory_e820()的代码,其它代码基本一样。
其中存放中断返回值得结构如下
在内核初始化跳入start_kernel函数后执行以下初始化
start_kernel()->setup_arch()->setup_memory_map()
在x86_init.c中定义了x86下的memory_setup函数
append_e820_map调用__append_e820_map实现
e820为e820map结构
其中E820_X_MAX大小为128.
到这里,物理内存就已经从BIOS中读出来存放到全局变量e820中,e820是linux内核中用于建立内存管理框架的基础。在后面我们会看到,建立初始化节点、管理区会用到他。
原文:http://www.cnblogs.com/virusolf/p/4951122.html