OK,不做引子了,接上篇Unity3D - 详解Quaternion类(一)走起!
Quaternion中的静态方法有9个即:Angle方法、Dot方法、Euler方法、FromToRotation方法、Inverse方法、Lerp方法、LookRotation方法、RotateToWards方法和Slerp方法。关于静态的方法的使用就是直接用类名调用其静态方法,例如Quaternion.Angle(q1,q2);下面对这些静态方法做下分析。
public static float Angle(Quaternion a,Quaternion b);
该方法可以计算两个旋转状态a达到b时需要旋转的最小夹角。
using UnityEngine; using System.Collections; public class Angle_ts : MonoBehaviour { // Use this for initialization void Start () { Quaternion q1 = Quaternion.identity; Quaternion q2 = Quaternion.identity; q1.eulerAngles = new Vector3(30.0f, 40.0f, 50.0f); float a1 = Quaternion.Angle(q1, q2); float a2 = 0.0f; Vector3 v = Vector3.zero; q1.ToAngleAxis(out a2,out v); Debug.Log("a1: " + a1); Debug.Log("a2: " + a2); Debug.Log("q1的欧拉角: " + q1.eulerAngles + " q1的rotation: " + q1); Debug.Log("q2的欧拉角: " + q2.eulerAngles + " q2的rotation: " + q2); } // Update is called once per frame void Update () { } }
运行结果
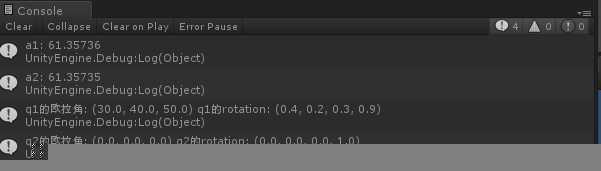
从输出结果可以看出a1和a2的值相等,即Angle的返回值是两个Quaternion实例转换的最小夹角。
public static float Dot(Quaternion a,Quaternion b);
该方法可以根据点乘的结果,判断a和b对应欧拉角的关系。
例如有两个Quaternion实例q1(x1,y1,z1,w1)和q2(x2,y2,z2,w2),则float f = Quaternion.Dot(q1,q2);即f = x1*x2+y1*y2+z1*z2+w1*w2,结果值f的范围为[-1,1]。
当f=+(-)1时,q1和q2对应的欧拉角是相等的,即旋转状态是一致的。特别地,当f = -1时,说明其中一个rotation比另外一个rotation多旋转了360°。
using UnityEngine; using System.Collections; public class Dot_ts : MonoBehaviour { public Transform A, B; Quaternion q1 = Quaternion.identity; Quaternion q2 = Quaternion.identity; // Use this for initialization void Start () { A.eulerAngles = new Vector3(0.0f, 40.0f, 0.0f); B.eulerAngles = new Vector3(0.0f, 360.0f + 40.0f, 0.0f); q1 = A.rotation; q2 = B.rotation; float f = Quaternion.Dot(q1, q2); Debug.Log("q1的欧拉角: " + q1.eulerAngles + " q1的rotation: " + q1); Debug.Log("q2的欧拉角: " + q2.eulerAngles + " q2的rotation: " + q2); Debug.Log("Dot(q1,q2): " + f); } // Update is called once per frame void Update () { } }
运行输出
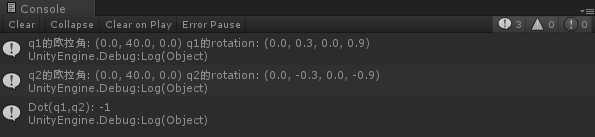
从输出结果可以证明q1和q2的欧拉角相等,但是rotation值却是相反的,也说明当Dot的返回值为-1时,两个参数的角度相差360°。
public static Quaternion Euler(Vector3 euler); public static Quaternion Euler(float x,float y,float z);
该方法用于返回欧拉角Vector3(ex,ey,ez)对应的四元数Quaternion q(qx,qy,qz,qw)。其对应关系如下:
已知PIover180 = 3.141592/180 = 0.0174532925f是计算机图形学中的一个常亮,其变换过程如下:
ex = ex * PIover180 / 2.0f;
ey = ey * PIover180 / 2.0f;
ez = ez * PIover180 / 2.0f;
qx = Mathf.Sin(ex) * Mathf.Cos(ey) * Mathf.Cos(ez) + Mathf.Cos(ex) * Mathf.Sin(ey) * Mathf.Sin(ez);
qy = Mathf.Cos(ex) * Mathf.Sin(ey) * Mathf.Cos(ez) - Mathf.Sin(ex) * Mathf.Cos(ey) * Mathf.Sin(ez);
qz = Mathf.Cos(ex) * Mathf.Cos(ey) * Mathf.Sin(ez) - Mathf.Sin(ex) * Mathf.Sin(ey) * Mathf.Cos(ez);
qw = Mathf.Cos(ex) * Mathf.Cos(ey) * Mathf.Cos(ez) + Mathf.Sin(ex) * Mathf.Sin(ey) * Mathf.Sin(ez);
using UnityEngine; using System.Collections; public class Euler_ts : MonoBehaviour { public float ex, ey, ez; float qx, qy, qz,qw; float PIover180 = 0.0174532925f; Quaternion q = Quaternion.identity; Vector3 euler; void OnGUI() { if(GUI.Button(new Rect(10.0f,10.0f,100.0f,45.0f),"计算")) { euler = new Vector3(ex,ey,ez); Debug.Log("欧拉角Euler(ex,ey,ez): " + euler); q = Quaternion.Euler(ex, ey, ez); Debug.Log("对应的四元数为: " + q); Debug.Log("q.x: " + q.x + " q.y: " + q.y + " q.z: " + q.z + " q.w: " + q.w); //验证算法 ex = ex * PIover180 / 2.0f; ey = ey * PIover180 / 2.0f; ez = ez * PIover180 / 2.0f; qx = Mathf.Sin(ex) * Mathf.Cos(ey) * Mathf.Cos(ez) + Mathf.Cos(ex) * Mathf.Sin(ey) * Mathf.Sin(ez); qy = Mathf.Cos(ex) * Mathf.Sin(ey) * Mathf.Cos(ez) - Mathf.Sin(ex) * Mathf.Cos(ey) * Mathf.Sin(ez); qz = Mathf.Cos(ex) * Mathf.Cos(ey) * Mathf.Sin(ez) - Mathf.Sin(ex) * Mathf.Sin(ey) * Mathf.Cos(ez); qw = Mathf.Cos(ex) * Mathf.Cos(ey) * Mathf.Cos(ez) + Mathf.Sin(ex) * Mathf.Sin(ey) * Mathf.Sin(ez); Debug.Log("qx: " + qx + " qy: " + qy + " qz: " + qz + " qw: " + qw); } } }
运行结果
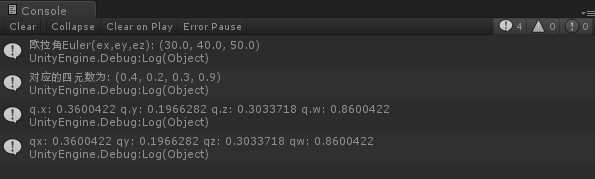
从输出结果可以证明该公式是正确,另外转换后的四元数直接输出的话,如下:
q = Quaternion.Euler(ex, ey, ez); Debug.Log("对应的四元数为: " + q);
输出值是做了四舍五入处理的。
函数原型
public static Quaternion FromToRotation(Vector3 fromDirection,Vector3 ToDirection);
在前面介绍了SetFromToRotation实例方法,它们的功能都是一样的只不过用法稍有不同。使用FromToRotation类静态方法,需要直接使用类名进行调用,如Quaternion.FromToRotation(v1,v2);
在此就不做演示了!
public static Quaternion Inverse(Quaternion rotation);
该方法可以返回参数rotation的逆向Quaternion值。
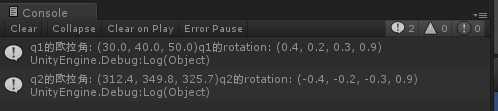
例如rotation(x,y,z,w),那么Quaternion.Inverse(rotation) = (-x,-y,-z,w)。假设rotation的欧拉角为(a,b,c),则transform.rotation = Quaternion.Inverse(rotation)相当于transform依次绕自身坐标系的z轴、x轴和y轴分别旋转-c°、-a°和-z°。由于是在局部坐标系内的变换,最后transform的欧拉角的各个分量值并不一定等于-a、-b或-c。
using UnityEngine; using System.Collections; public class Invers_ts : MonoBehaviour { public Transform A, B; // Use this for initialization void Start () { Quaternion q1 = Quaternion.identity; Quaternion q2 = Quaternion.identity; q1.eulerAngles = new Vector3(30.0f,40.0f,50.0f); q2 = Quaternion.Inverse(q1); A.rotation = q1; B.rotation = q2; Debug.Log("q1的欧拉角: " + q1.eulerAngles + "q1的rotation: " + q1); Debug.Log("q2的欧拉角: " + q2.eulerAngles + "q2的rotation: " + q2); } // Update is called once per frame void Update () { } }
运行截图
public static Quaternion Lerp(Quaternion form, Quaternion to,float t); public static Quaternion Slerp(Quaternion form, Quaternion to,float t);
两种方法的作用都是返回从form到to的插值。当参数t<=0时返回值为from,当参数t>=1时返回值为to。其中Lerp是线性差值,而Slerp是球面插值。
using UnityEngine; using System.Collections; public class LerpAndSlerp_ts : MonoBehaviour { public Transform A, B, C,D; float speed = 0.2f; float total = 0.0f; // Use this for initialization void Start () { } // Update is called once per frame void Update () { total += Time.deltaTime * speed; if(total >= 1.0f) total = 1.0f; C.rotation = Quaternion.Lerp(A.rotation, B.rotation, total); D.rotation = Quaternion.Lerp(A.rotation, B.rotation, total); //C.rotation = Quaternion.Lerp(A.rotation, B.rotation, Time.deltaTime * speed); //D.rotation = Quaternion.Lerp(A.rotation, B.rotation, Time.deltaTime * speed); } }
public static Quaternion RotateTowards(Quaternion from, Quaternion to, float maxDegreesDelta);
该方法也是一个插值方法,即从返回参数from到to的插值,且返回值的最大角度不超过maxDegreesDelta。maxDegreesDelta是角度值,不是插值系数,当maxDegreesDelta < 0时,将进行逆向插值即从to到from的方向进行插值计算。
using UnityEngine; using System.Collections; public class RotateToWards_ts : MonoBehaviour { public Transform A, B, C; float speed = 10.0f; float total = 0.0f; // Use this for initialization void Start() { } // Update is called once per frame void Update() { total += Time.deltaTime * speed; if (total >= 1.0f) total = 1.0f; C.rotation = Quaternion.RotateTowards(A.rotation, B.rotation, Time.time * speed - 40.0f); Debug.Log("C与A的欧拉角的插值: " + (C.eulerAngles - A.eulerAngles) + "maxDegreesDelta: " + (Time.time * speed - 40.0f)); } }
运行截图
函数原型
public static Quaternion LookRotation(Vector3 forward); public static Quaternion LookRotation(Vector3 forward,Vector3 upwards);
参数forward为返回Quaternion实例的forward朝向。该方法和前面讲到的SetLookRotation实例方法的功能是一样的,故不多做阐述了。
Quaternion类涉及到两个Quaternion对象相乘和Quaternion对象与Vector3对象相乘,那么就必须重载"*"运算符。
public static Quaternion operator *(Quaternion lhs, Quaternion rhs); public static Vector3 operator *(Quaternion rotation, Vector3 point);
对于两个Quaternion对象相乘主要用于自身旋转变换,例如:
B.rotation *= A.rotation;
using UnityEngine; using System.Collections; public class Multiply1_ts : MonoBehaviour { public Transform A, B; // Use this for initialization void Start () { A.eulerAngles = new Vector3(1.0f, 1.5f, 2.0f); } // Update is called once per frame void Update () { B.rotation *= A.rotation; Debug.Log(B.eulerAngles); } }
运行截图
B绕着其自身坐标系的Vector3(1.0f,1.5f,2.0f)方向旋转。虽然每次都绕着这个轴向旋转的角度相同,但角度的旋转在3个坐标轴的值都不为零,三个轴的旋转会相互影响,所以B的欧拉角的各个分量的每次递增是不固定的。
对于Quaternion对象与Vector3对象相乘主要用于自身移动变换,例如
transform.position += tansform.rotation * A;
其中A为Vector3的对象。transform对应的对象会沿着自身坐标系中向量A的方向移动A的模长的距离。transform.rotation与A相乘可以确定移动的方向和距离。
using UnityEngine; using System.Collections; public class Multiply2_ts : MonoBehaviour { public Transform A; float speed = 0.1f; // Use this for initialization void Start () { A.position = Vector3.zero; A.eulerAngles = new Vector3(0.0f, 45.0f, 0.0f); } // Update is called once per frame void Update () { A.position += A.rotation * (Vector3.forward * speed); Debug.Log(A.position); } }
运行截图
--------------------------------------------------------------------------------------------------------至此完结!-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
原文:http://www.cnblogs.com/tgycoder/p/5106463.html