对于一个新新新手,Linux,ROS都要学习。安装ROS真的很讨厌了,于是采用易科机器人实验室的ubuntu12.04-amd64-ros-exbot-h2-140520版本。
测试一下小乌龟节点、主题什么的。
新建一个终端,输入$ roscore
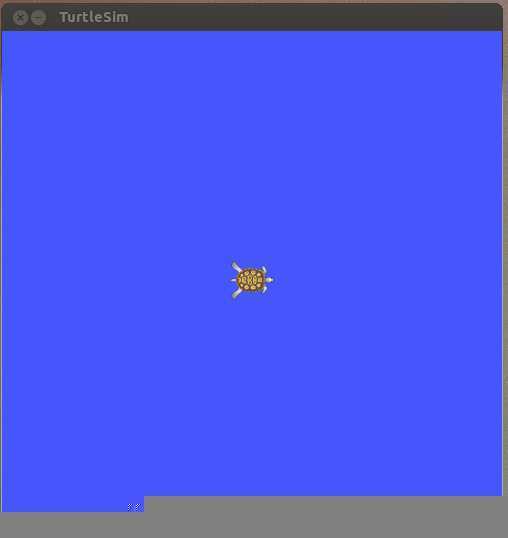
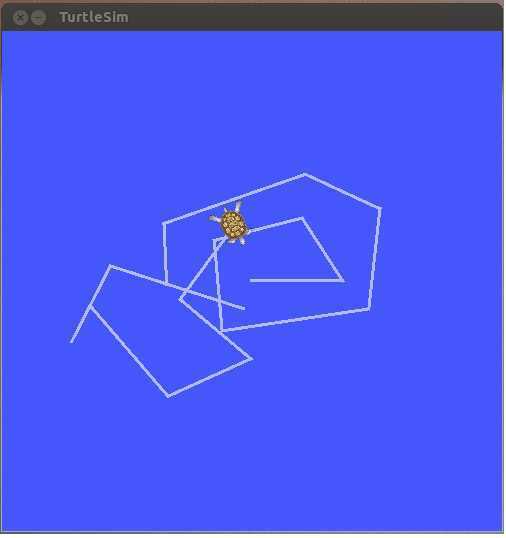
新建一个终端,输入$ rosrun turtlesim turtlesim_node
新建一个终端,输入$ rosrun turtlesim turtle_telelop_key
移动上下左右键,看到小乌龟移动了。
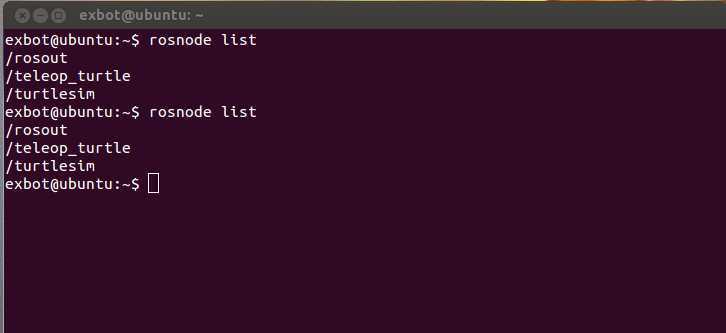
新建一个终端,输入$ rosnode list
查看运行的节点。
原文:http://www.cnblogs.com/yhlx125/p/5138317.html