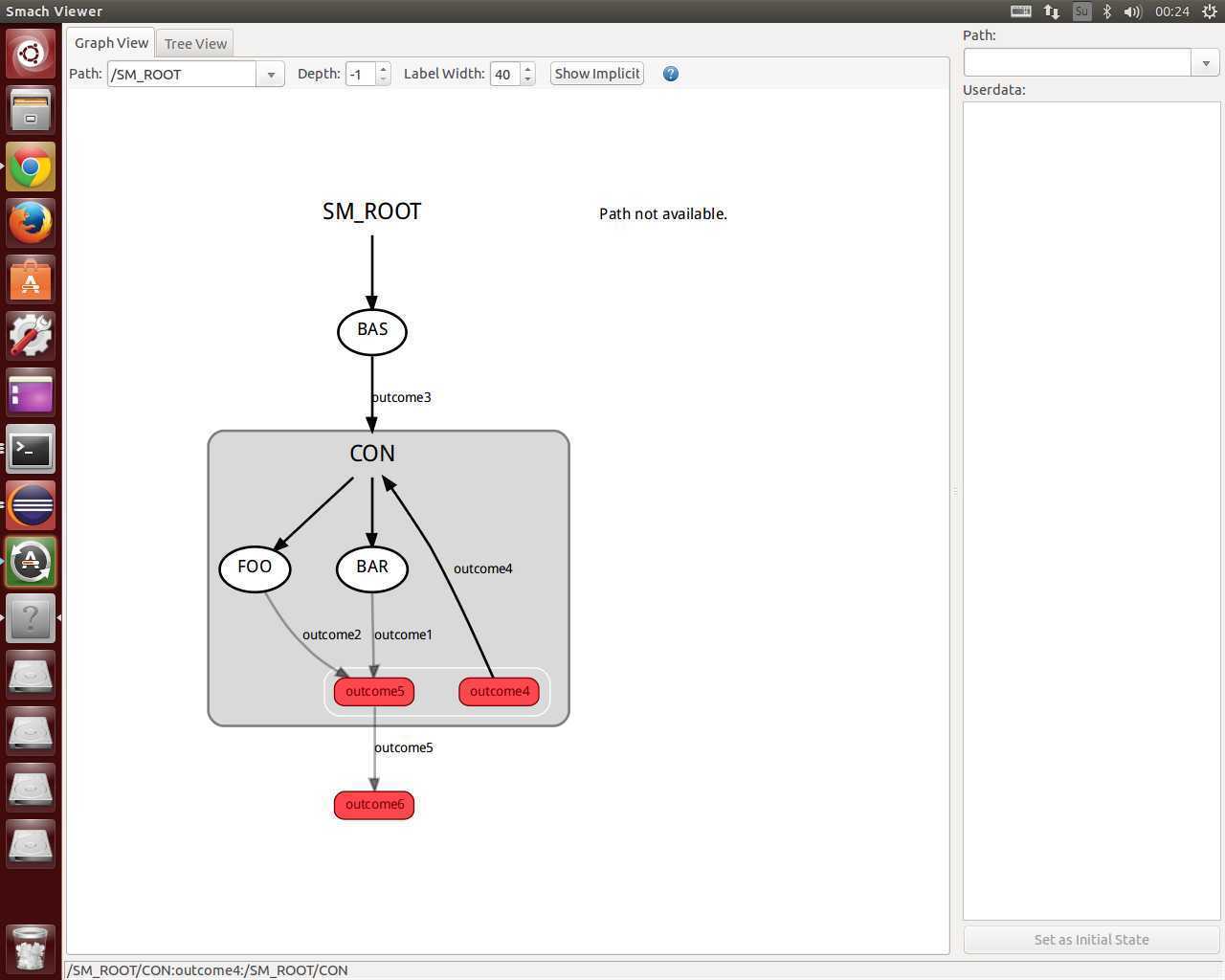
Concurrent状态机是一种同时执行多个状态的状态机。如下图所示。状态FOO和BAR同时执行,当两个状态输出的结果同时满足一个组合条件时(FOO输出outcome2,BAR输出outcome1)才会映射到状态CON的输出结果outcome4。
具体地,实现代码如下:
#!/usr/bin/env python import roslib; roslib.load_manifest(‘smach_example‘) import time import rospy import smach import smach_ros # define state Foo class Foo(smach.State): def __init__(self): smach.State.__init__(self, outcomes=[‘outcome1‘,‘outcome2‘]) self.counter = 0 def execute(self, userdata): rospy.loginfo(‘Executing state FOO‘) time.sleep(1) if self.counter < 5: self.counter += 1 return ‘outcome1‘ else: return ‘outcome2‘ # define state Bar class Bar(smach.State): def __init__(self): smach.State.__init__(self, outcomes=[‘outcome1‘]) def execute(self, userdata): time.sleep(1) rospy.loginfo(‘Executing state BAR‘) return ‘outcome1‘ # define state Bas class Bas(smach.State): def __init__(self): smach.State.__init__(self, outcomes=[‘outcome3‘]) def execute(self, userdata): rospy.loginfo(‘Executing state BAS‘) return ‘outcome3‘ def main(): rospy.init_node(‘smach_example_state_machine‘) # Create the top level SMACH state machine sm_top = smach.StateMachine(outcomes=[‘outcome6‘]) # Open the container with sm_top: smach.StateMachine.add(‘BAS‘, Bas(), transitions={‘outcome3‘:‘CON‘}) # Create the sub SMACH state machine sm_con = smach.Concurrence(outcomes=[‘outcome4‘,‘outcome5‘], default_outcome=‘outcome4‘, outcome_map={‘outcome5‘: { ‘FOO‘:‘outcome2‘, ‘BAR‘:‘outcome1‘}}) # Open the container with sm_con: # Add states to the container smach.Concurrence.add(‘FOO‘, Foo()) smach.Concurrence.add(‘BAR‘, Bar()) smach.StateMachine.add(‘CON‘, sm_con, transitions={‘outcome4‘:‘CON‘, ‘outcome5‘:‘outcome6‘}) # Create and start the introspection server sis = smach_ros.IntrospectionServer(‘server_name‘, sm_top, ‘/SM_ROOT‘) sis.start() # Execute SMACH plan outcome = sm_top.execute() rospy.spin() sis.stop() if __name__ == ‘__main__‘: main()
参考资料:
[1]. http://wiki.ros.org/smach/Tutorials/Concurrent%20States
问题:只要BAR或FOO之一结束,就输出相应打结果,这个如何做到?还没找到方法
原文:http://www.cnblogs.com/cv-pr/p/5165004.html