ORB-SLAM是一种基于特征的三维定位与地图构建算法(SLAM)。该算法由Raul Mur-Artal,J. M. M. Montiel和Juan D. Tardos于2015年发表在IEEE Transactions on Robotics。ORB-SLAM基于PTAM架构,增加了地图初始化和回环检测的功能,优化了关键帧选取和地图构建的方法,在处理速度、追踪效果和地图精度上都取得了不错的效果。
ORB-SLAM算法的一大特点是在所有步骤统一使用图像的ORB特征。ORB特征是一种非常快速的特征提取方法,具有旋转不变性,并可以利用金字塔构建出尺度不变性。使用统一的ORB特征有助于SLAM算法在特征提取与追踪、关键帧选取、三维重建、闭环检测等步骤具有内生的一致性。
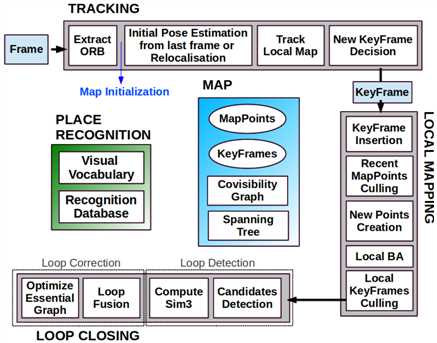
ORB-SLAM架构如下:
原文:http://www.cnblogs.com/luyb/p/5215168.html