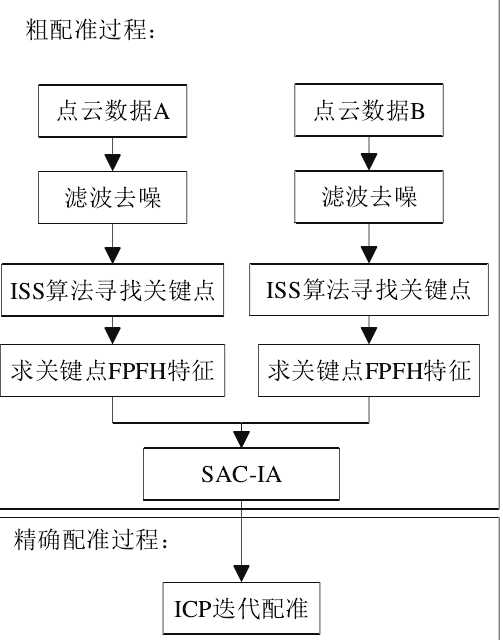
A, UniformSampling降噪
B, ISS计算关键点, FPFH特征
在FeatureCloud::setInputCloud中读入点云,并调用processInput进行处理:
1, computeSurfaceNormals ()
使用NormalEstimation计算得到表面法向量
2, computeLocalFeatures ()
getKeypointsIndicesinRadius
C, SAC-IA配准
findBestAlignment中进行SAC-IA配准计算
D, ICP进一步配准
//==打印输出调试信息==//
FILE* fxp = fopen("F:\\x_p.txt","w+");
fclose(fxp);