1. 坐标系旋转
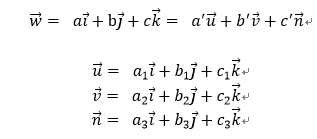
首先定义一个向量,该向量由(i, j, k)坐标系和(u,v,n)坐标系表示
这里说明了(u,v,n)和(i, j, k)的向量关系。
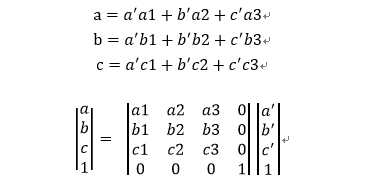
代入变量,替换,得到坐标之间的关系,并列出矩阵
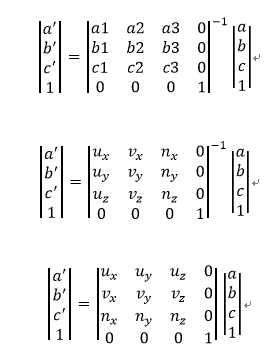
经过计算可得到,坐标系的旋转矩阵R
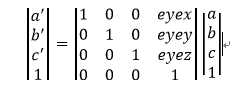
2.坐标系平移
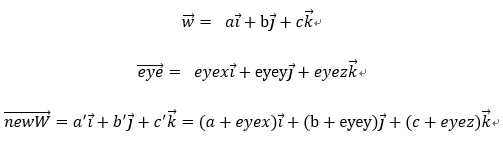
坐标系旋转之后,只要把坐标系平移,(即平移坐标中心)
需要平移的点的向量w,需要平移距离的向量eye,平移结束后,坐标原点到该点的向量newW,的关系如下
列出平移矩阵T
3.坐标系变换
现在可以把旋转和平移结合在一起,坐标系变换矩阵如下
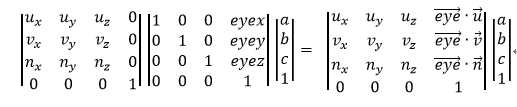
学会了坐标系的变换,向量的旋转,我们就可以做出360度旋转的摄像机了
原文:http://www.cnblogs.com/keyncoin/p/5492676.html