1.立体视觉基础
深度定义为物体间的距离
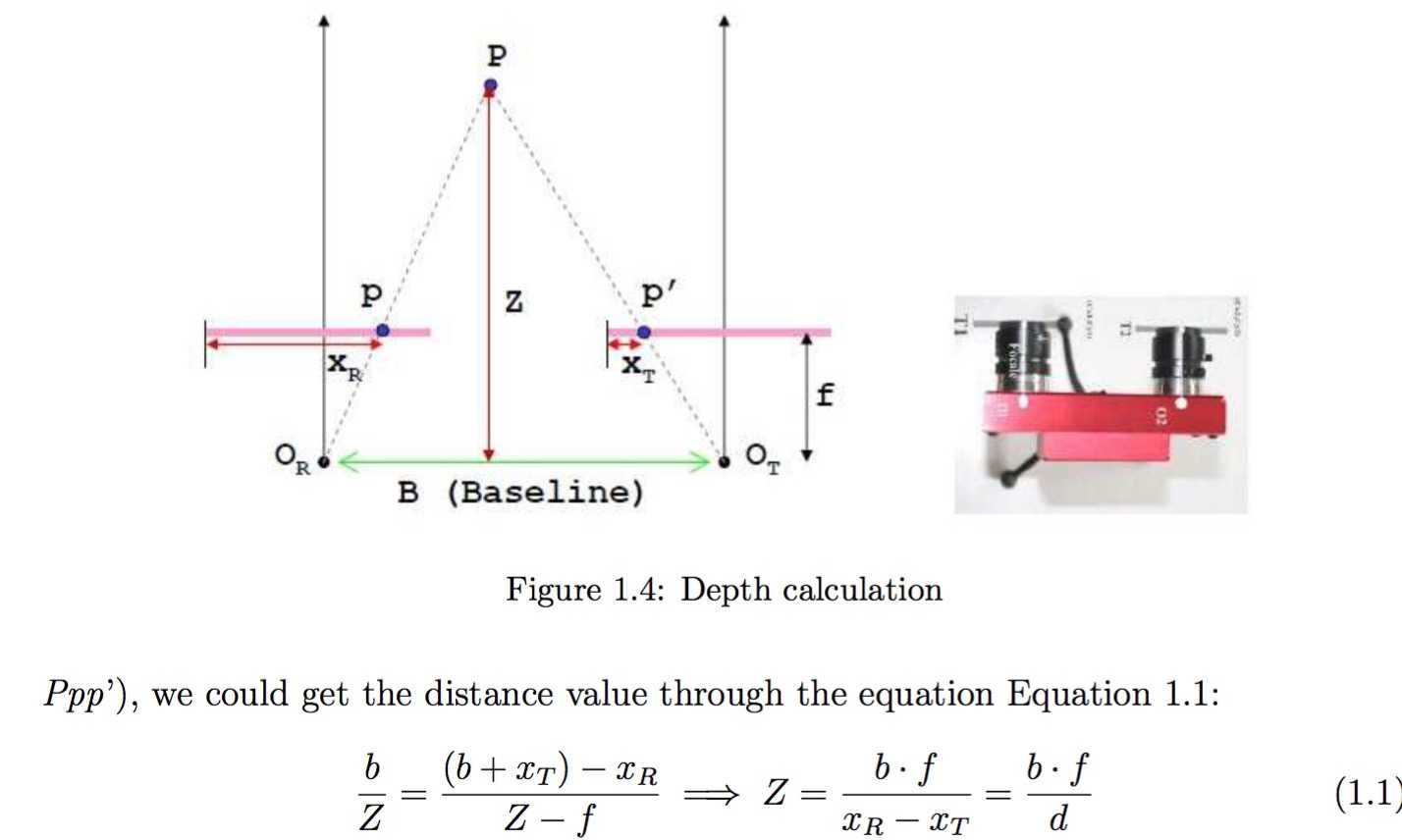
视差定义为同一点在左图(reference image) 和右图( target image) 中的x坐标差。
根据左图中每个点的视差得到的灰度图称为视差图。
那么根据三角几何关系可以由视差(xR - xT ) 计算出深度.b=camera基线距离,f=焦距。
离相机越近的视差越大,表现在视差图上越亮。
[阅读笔记]Zhang Y. 3D Information Extraction Based on GPU.2010.
原文:http://www.cnblogs.com/mlj318/p/6189718.html