rosrun pubimage pubmono
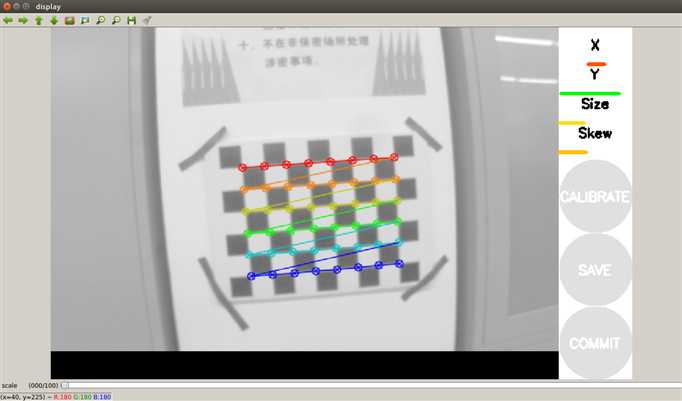
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.0435 image:=/Camera/IDS_mono_image camera:=/Camera --no-service-check
(‘D = ‘, [-0.2560119141217324, 0.09121820514373571, 0.0008929015537432972, -0.0002949864883705548, 0.0])(‘K = ‘, [560.745775283255, 0.0, 356.3142864442747, 0.0, 562.0282510615026, 240.27152352754922, 0.0, 0.0, 1.0])(‘R = ‘, [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0])(‘P = ‘, [493.8046875, 0.0, 350.6994767608121, 0.0, 0.0, 533.846435546875, 240.13280532319186, 0.0, 0.0, 0.0, 1.0, 0.0])None# oST version 5.0 parameters[image]width752height480[narrow_stereo]camera matrix560.745775 0.000000 356.3142860.000000 562.028251 240.2715240.000000 0.000000 1.000000distortion-0.256012 0.091218 0.000893 -0.000295 0.000000rectification1.000000 0.000000 0.0000000.000000 1.000000 0.0000000.000000 0.000000 1.000000projection493.804688 0.000000 350.699477 0.0000000.000000 533.846436 240.132805 0.0000000.000000 0.000000 1.000000 0.000000
原文:http://www.cnblogs.com/youzx/p/6385493.html

