BH1750FVI 是一款 IIC 接口的数字型光强度传感器集成电路。下面介绍一下其在 Windows 10 IoT Core 环境下的用法。
项目运行在 Raspberry Pi 2/3 上,使用 C# 进行编码。
1. 准备
包含 BH1750FVI 的传感器,这里选择的是淘宝上最多的 GY-30;Raspberry Pi 2/3 一块,环境为 Windows 10 IoT Core;公母头杜邦线 4-5 根
2. 连线
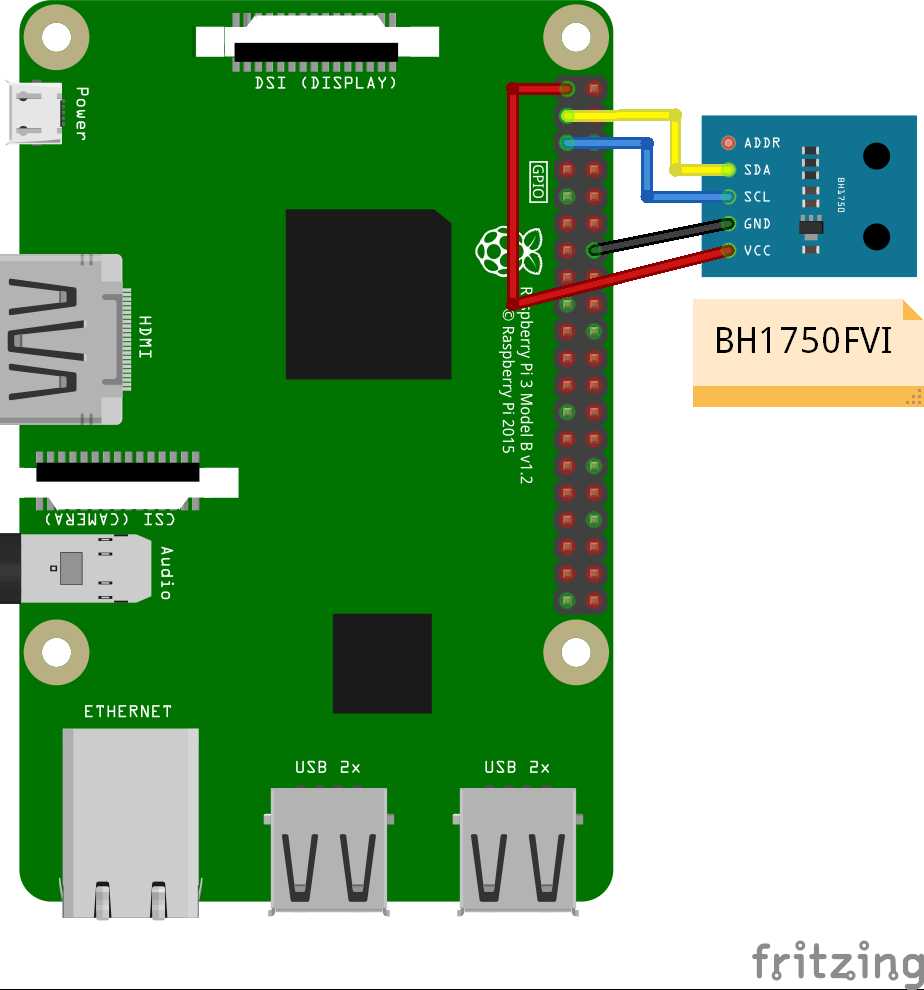
Raspberry Pi 2/3 的引脚如图
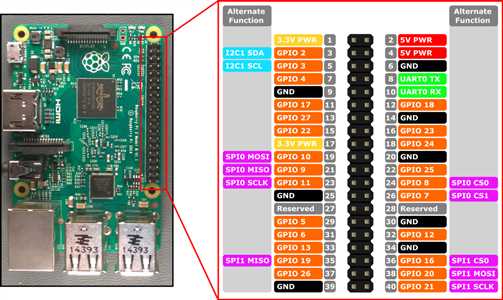
由于采用的是 IIC 通信方式,因此我们需要把 GY-30 上的 SDA 与 Pin3 相连,SCL 与 Pin5 相连。VCC 接 3.3V,GND 接地。ADD 决定了传感器的地址,将其连接至 VCC ≥ 0.7 V 的时候,地址为 0x5C,接地时为 0x23。可以不连接。
SDA - Pin3
SCL - Pin5
VCC - 3.3V
GND - GND
3. 代码
GitHub : https://github.com/ZhangGaoxing/windows-iot-demo/tree/master/BH1750FVIDemo
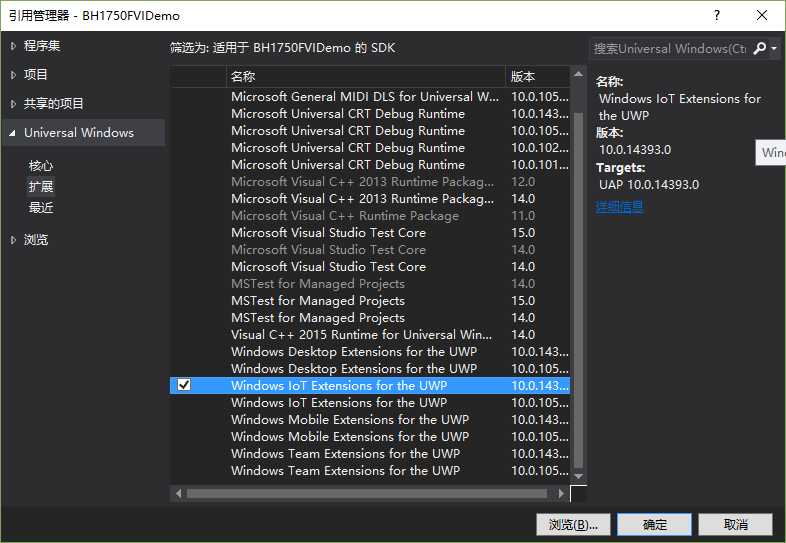
需要新建一个 Windows 通用 项目 ,并且添加引用 Windows IoT Extensions for the UWP
在项目中添加一个 C# 代码文件 BH1750FVI.cs,代码如下
using System; using System.Threading.Tasks; using Windows.Devices.I2c; namespace BH1750FVIDemo { /// <summary> /// I2C Address Setting /// </summary> enum AddressSetting { /// <summary> /// ADD Pin connect to high power level /// </summary> AddPinHigh = 0x5C, /// <summary> /// ADD Pin connect to low power level /// </summary> AddPinLow = 0x23 }; /// <summary> /// The mode of measuring /// </summary> enum MeasurementMode { /// <summary> /// Start measurement at 1 lx resolution /// </summary> ContinuouslyHighResolutionMode = 0x10, /// <summary> /// Start measurement at 0.5 lx resolution /// </summary> ContinuouslyHighResolutionMode2 = 0x11, /// <summary> /// Start measurement at 4 lx resolution /// </summary> ContinuouslyLowResolutionMode = 0x13, /// <summary> /// Start measurement at 1 lx resolution once /// </summary> OneTimeHighResolutionMode = 0x20, /// <summary> /// Start measurement at 0.5 lx resolution once /// </summary> OneTimeHighResolutionMode2 = 0x21, /// <summary> /// Start measurement at 4 lx resolution once /// </summary> OneTimeLowResolutionMode = 0x23 } /// <summary> /// Setting light transmittance /// </summary> enum LightTransmittance { Fifty, Eighty, Hundred, Hundred_Twenty, Hundred_Fifty, Two_Hundred } class BH1750FVI { I2cDevice sensor; private byte sensorAddress; private byte sensorMode; private byte sensorResolution = 1; private double sensorTransmittance = 1; private byte registerHighVal = 0x42; private byte registerLowVal = 0x65; /// <summary> /// Constructor /// </summary> /// <param name="address">Enumeration type of AddressSetting</param> /// <param name="mode">Enumeration type of MeasurementMode</param> public BH1750FVI(AddressSetting address, MeasurementMode mode) { sensorAddress = (byte)address; sensorMode = (byte)mode; if (mode == MeasurementMode.ContinuouslyHighResolutionMode2 || mode == MeasurementMode.OneTimeHighResolutionMode2) { sensorResolution = 2; } } /// <summary> /// Constructor /// </summary> /// <param name="address">Enumeration type of AddressSetting</param> /// <param name="mode">Enumeration type of MeasurementMode</param> /// <param name="transmittance">Enumeration type of LightTransmittance</param> public BH1750FVI(AddressSetting address, MeasurementMode mode, LightTransmittance transmittance) { sensorAddress = (byte)address; sensorMode = (byte)mode; if (mode == MeasurementMode.ContinuouslyHighResolutionMode2 || mode == MeasurementMode.OneTimeHighResolutionMode2) { sensorResolution = 2; } switch (transmittance) { case LightTransmittance.Fifty: { registerHighVal = 0x44; registerLowVal = 0x6A; sensorTransmittance = 0.5; } break; case LightTransmittance.Eighty: { registerHighVal = 0x42; registerLowVal = 0x76; sensorTransmittance = 0.8; } break; case LightTransmittance.Hundred: { registerHighVal = 0x42; registerLowVal = 0x65; } break; case LightTransmittance.Hundred_Twenty: { registerHighVal = 0x41; registerLowVal = 0x7A; sensorTransmittance = 1.2; } break; case LightTransmittance.Hundred_Fifty: { registerHighVal = 0x41; registerLowVal = 0x7E; sensorTransmittance = 1.5; } break; case LightTransmittance.Two_Hundred: { registerHighVal = 0x41; registerLowVal = 0x73; sensorTransmittance = 2; } break; } } /// <summary> /// Initialize BH1750FVI /// </summary> public async Task InitializeAsync() { var settings = new I2cConnectionSettings(sensorAddress); settings.BusSpeed = I2cBusSpeed.FastMode; var controller = await I2cController.GetDefaultAsync(); sensor = controller.GetDevice(settings); sensor.Write(new byte[] { 0x01 }); sensor.Write(new byte[] { registerHighVal }); sensor.Write(new byte[] { registerLowVal }); } /// <summary> /// Read data from BH1750FVI /// </summary> /// <returns>A double type contains data</returns> public double Read() { byte[] readBuf = new byte[2]; sensor.WriteRead(new byte[] { sensorMode }, readBuf); byte temp = readBuf[0]; readBuf[0] = readBuf[1]; readBuf[1] = temp; double result = BitConverter.ToUInt16(readBuf, 0) / (1.2 * sensorResolution * sensorTransmittance); return result; } /// <summary> /// Cleanup /// </summary> public void Dispose() { sensor.Dispose(); } } }
下面解释如何使用
代码包含三个枚举类型,两个构造函数,三个方法。
第一步调用构造函数将 BH1750FVI 实例化。
第二步调用 InitializeAsync() 初始化 I2C 设备
第三步调用 Read() 读取数据,返回的是一个 double 类型的值
当需要关闭设备时,调用 Dispose()
张高兴的 Windows 10 IoT 开发笔记:BH1750FVI 光照度传感器
原文:http://www.cnblogs.com/lonelyxmas/p/7512705.html