就是实现这样:
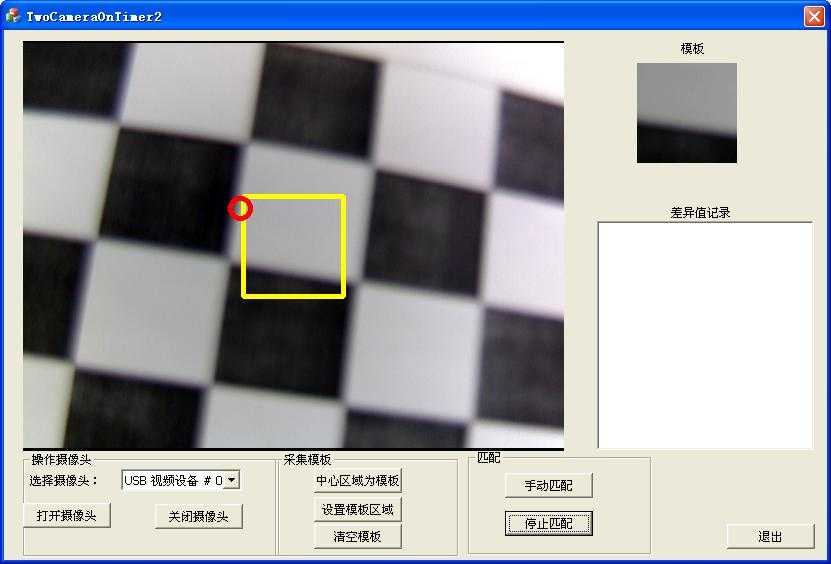
其中,能够根据模版运算,自动实时从图中找出相同模版的地方。从而能够计算出镜头的相对位移。
模板匹配的工作方式
模板匹配的工作方式跟直方图的反向投影基本一样,大致过程是这样的:通过在输入图像上滑动图像块对实际的图像块和输入图像进行匹配。
假设我们有一张100x100的输入图像,有一张10x10的模板图像,查找的过程是这样的:
(1)从输入图像的左上角(0,0)开始,切割一块(0,0)至(10,10)的临时图像;
(2)用临时图像和模板图像进行对比,对比结果记为c;
(3)对比结果c,就是结果图像(0,0)处的像素值;
(4)切割输入图像从(0,1)至(10,11)的临时图像,对比,并记录到结果图像;
(5)重复(1)~(4)步直到输入图像的右下角。
大家可以看到,直方图反向投影对比的是直方图,而模板匹配对比的是图像的像素值;模板匹配比直方图反向投影速度要快一些,但是我个人认为直方图反向投影的鲁棒性会更好。
模板匹配的匹配方式
在OpenCv和EmguCv中支持以下6种对比方式:
CV_TM_SQDIFF 平方差匹配法:该方法采用平方差来进行匹配;最好的匹配值为0;匹配越差,匹配值越大。
CV_TM_CCORR 相关匹配法:该方法采用乘法操作;数值越大表明匹配程度越好。
CV_TM_CCOEFF 相关系数匹配法:1表示完美的匹配;-1表示最差的匹配。
CV_TM_SQDIFF_NORMED 归一化平方差匹配法
CV_TM_CCORR_NORMED 归一化相关匹配法
CV_TM_CCOEFF_NORMED 归一化相关系数匹配法
根据我的测试结果来看,上述几种匹配方式需要的计算时间比较接近(跟《学习OpenCv》书上说的不同),我们可以选择一个能适应场景的匹配方式。
程序和视频 http://pan.baidu.com/s/1eQAEs62 89gb
原文:http://www.cnblogs.com/jsxyhelu/p/3809098.html