学习心得:
在研究SLAM时候,除了对三维世界刚体运动表示外(ch3),由于噪声的影响,还要进行对可能的位姿进行优化,而旋转矩阵必须得是行列式为1的正交矩阵,
为了减少这种约束,我们希望通过李群和李代数之间的关系,把位姿估计变为无约束的问题
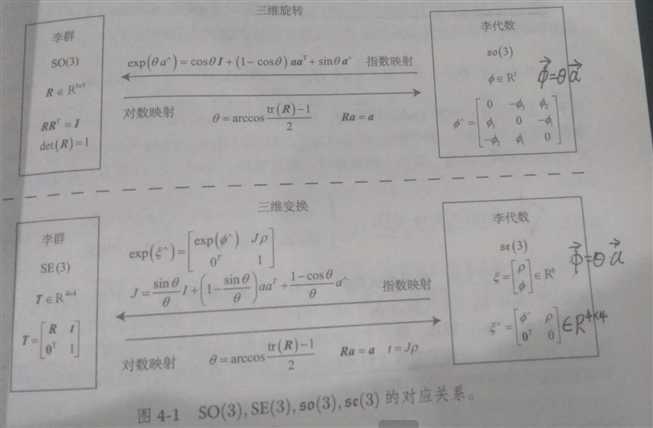
李群和李代数是群论里的一部分,我们研究的SO(3) SE(3)都是李群,SO(3) SE(3)只有乘法没有加法,既然没有加法,就不存在取极限,更没有求导了
所以引入李代数来实现求导,进而引出了扰动模型

缺陷
虽然数学推导确实很难,但其实做数学推导还是有很多好处的,比如可以加深对公式的理解和记忆,以后看到类似paper的时候就不会感到晕了【类比思想嘛】,比如相似变换群(Sim(3))
但即使这样做下来,除了对SO(3) 和 se(3)有一些很好的把握外,变换矩阵的还有点不太清楚,第二遍争取可以把公式再梳理一遍
答案
原文:http://www.cnblogs.com/-Mr-y/p/7745584.html