TCNN
得到的跟踪轨迹既可以用来提高目标召回率,也可以作为长序列上下文信息对结果进行修正。
结合光流,实现特征图的帧间传播和复用。
Deep Feature Flow
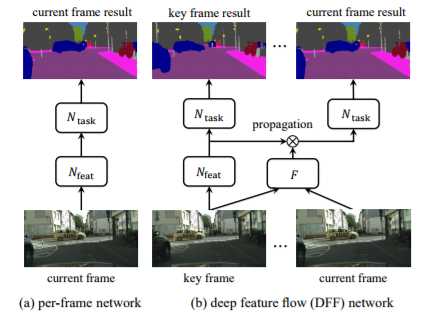
F 为两帧得到的光流信息,光流计算较慢,所以在(deep learning for video saliency detection)中直接将两帧图像送入网络学习时域信息,而不是计算光流信息。
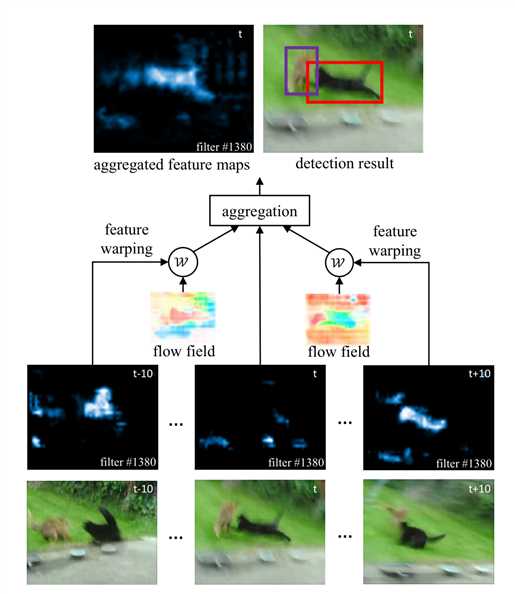
t 帧得到的光流特征不明显,而t+10, t-10 的明显,用motion-guided spatial warping预测帧之间的motion,将这些特征融合。将融合后的feature map fed to detection network得到最后的检测结果
tracking---TLD
tracking learning detection:TLD是对视频中未知物体的长时间跟踪的算法。
TLD算法主要由三个模块构成:追踪器(tracker),检测器(detector)和机器学习(learning)
常用的方法有两种,一是使用追踪器根据物体在上一帧的位置预测它在下一帧的位置,但这样会积累误差,而且一旦物体在图像中消失,追踪器就会永久失效,即使物体再出现也无法完成追踪;另一种方法是使用检测器,对每一帧单独处理检测物体的位置,但这又需要提前对检测器离线训练,只能用来追踪事先已知的物体。
追踪器的作用是跟踪连续帧间的运动,当物体始终可见时跟踪器才会有效。追踪器根据物体在前一帧已知的位置估计在当前帧的位置,这样就会产生一条物体运动的轨迹,从这条轨迹可以为学习模块产生正样本(Tracking->Learning)。
检测器的作用是估计追踪器的误差,如果误差很大就改正追踪器的结果。检测器对每一帧图像都做全面的扫描,找到与目标物体相似的所有外观的位置,从检测产生的结果中产生正样本和负样本,交给学习模块(Detection->Learning)。算法从所有正样本中选出一个最可信的位置作为这一帧TLD的输出结果,然后用这个结果更新追踪器的起始位置(Detection->Tracking)。
学习模块根据追踪器和检测器产生的正负样本,迭代训练分类器,改善检测器的精度(Learning->Detection)。
光流法:
梯度下降的优化方法,空间运动物体在观察成像平面上的像素运动的瞬时速度。是利用图像序列中像素在时间域上的变化以及相邻帧之间的相关性来找到上一帧跟当前帧之间存在的对应关系,从而计算出相邻帧之间物体的运动信息的一种方法。
其计算方法可以分为三类:
(1)基于区域或者基于特征的匹配方法;
(2)基于频域的方法;
(3)基于梯度的方法;
光流是空间运动物体在观测成像平面上的像素运动的“瞬时速度”。光流的研究是利用图像序列中的像素强度数据的时域变化和相关性来确定各自像素位置的“运动”。
原文:http://www.cnblogs.com/fanhaha/p/7835125.html