下面使用SYD Dynamics的9轴AHRS(Attitude and heading reference system),来发布sensor_msgs/Imu类型的消息。

将传感器用USB转串口接到Ubuntu系统上,可以用如下命令查看串口信息:
ls -l /dev/tty*
查询出串口名为“/dev/ttyUSB0”。根据官方给的传感器程序源文件和boost::asio库来实现串口发送request指令,并读取传感器返回的四元数信息。之后将其发送到/IMU_data的话题上:
// Step 1: Include Library Headers: #include "EasyObjectDictionary.h" #include "EasyProfile.h" #include <ros/ros.h> #include <sensor_msgs/Imu.h> #include <boost/asio.hpp> // 包含boost库函数 #include <boost/bind.hpp> using namespace boost::asio;
int main(int argc, char** argv) { // Step 2: Initialization: EasyProfile_C_Interface_Init(); ros::init(argc, argv, "imu"); ros::NodeHandle n; ros::Publisher IMU_pub = n.advertise<sensor_msgs::Imu>("IMU_data", 20); io_service io; serial_port sp(io, "/dev/ttyUSB0"); // 定义传输的串口 sp.set_option(serial_port::baud_rate(115200)); // 波特率 sp.set_option( serial_port::flow_control( serial_port::flow_control::none ) ); // 流量控制 sp.set_option( serial_port::parity( serial_port::parity::none ) ); // 奇偶校验 sp.set_option( serial_port::stop_bits( serial_port::stop_bits::one ) ); // 停止位 sp.set_option( serial_port::character_size( 8 ) ); // 数据位 ros::Rate loop_rate(50); while(ros::ok()) { // Step 3 and Step 4 are optional, only if you want to use the request-response communication pattern // Step 3: Request quaternion Data from TransdcuerM uint16 toId = 309; // Node ID char* txData; int txSize; if(EP_SUCC_ == EasyProfile_C_Interface_TX_Request(toId, EP_CMD_Q_S1_E_, &txData, &txSize)) { write(sp, buffer(txData, txSize)); // Step 4: Send the request via Serial Port. } char rxData[100]; boost::system::error_code err; sp.read_some(buffer(rxData, 50),err); // Read from serial port buffer if (err) { ROS_INFO("Serial port read_some Error!"); return -1; } Ep_Header header; // Then let the EasyProfile do the rest such as data assembling and checksum verification. if( EP_SUCC_ == EasyProfile_C_Interface_RX((char*)rxData, 50, &header)) { // Quanternion received unsigned int timeStamp = ep_Q_s1_e.timeStamp; float q1 = ep_Q_s1_e.q[0]; // Note 1, ep_Q_s1_e is defined in the EasyProfile library as a global variable float q2 = ep_Q_s1_e.q[1]; // Note 2, for the units and meaning of each value, refer to EasyObjectDictionary.h float q3 = ep_Q_s1_e.q[2]; float q4 = ep_Q_s1_e.q[3]; ROS_INFO("Q: %f %f %f %f\n", q1, q2, q3, q4); sensor_msgs::Imu imu_data; imu_data.header.stamp = ros::Time::now(); imu_data.header.frame_id = "base_link"; imu_data.orientation.x = q3; imu_data.orientation.y = -q2; imu_data.orientation.z = -q1; imu_data.orientation.w = q4; IMU_pub.publish(imu_data); } io.run(); ros::spinOnce(); loop_rate.sleep(); } return 0; }
在CMakeLists中添加:
add_compile_options(-std=c99)
aux_source_directory(./src DIR_SRCS)
add_executable(imu ${DIR_SRCS} )
target_link_libraries(imu ${catkin_LIBRARIES})
使用catkin_make编译后,source ./devel/setup.bash,然后运行rosrun imu imu。这时可能会出现无法打开串口的错误,给串口添加权限后再次运行:
sudo chmod 666 /dev/ttyUSB0
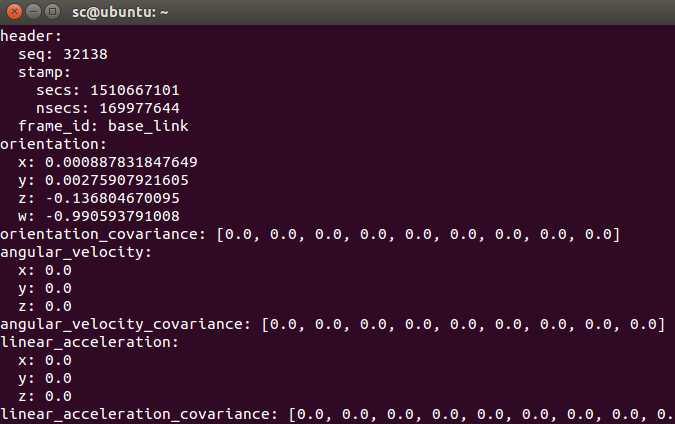
无问题后可以输入下面的指令查看话题,转动IMU可以看到orientation的四个分量一直在变化:
rostopic echo /IMU_data
为了更形象的显示IMU姿态,可以下载rviz_imu_plugin插件并安装。The rviz_imu_plugin package is used to display sensor_msgs/Imu messages in rviz. Once you download and compile the package, it should be visible as a plugin. It displays the orientation of the IMU using a box as well as and coordinate axes. The acceleration can be visualized using a vector.
Make sure you have git installed:
sudo apt-get install git-core
Download the stack from our repository into your catkin workspace
git clone -b indigo https://github.com/ccny-ros-pkg/imu_tools.git
Compile the stack:
cd ~/catkin_ws
catkin_make
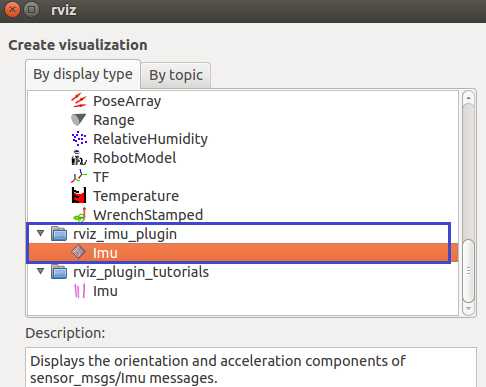
装好后打开rviz,可以看到rviz_imu_plugin与rviz中默认自带的rviz_plugin_tutorials并不一样:
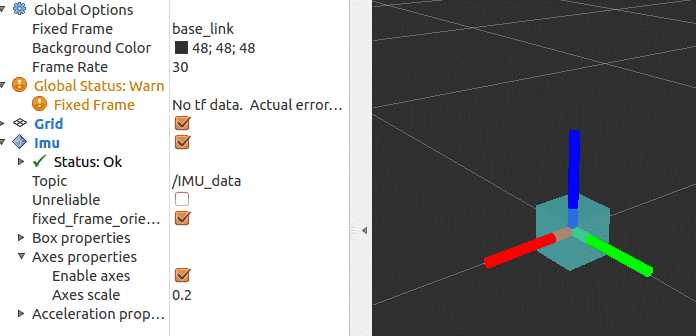
在rviz_imu_plugin下添加imu,修改Fixed Frame为base_link,IMU下面的Topic选为/IMU_data,转动IMU rviz中的虚拟立方体和坐标轴会跟着转动(可以更改box三个方向尺寸的比例):
参考:
Serial Cross-platform, Serial Port library written in C++
原文:http://www.cnblogs.com/21207-iHome/p/7832355.html