实验目的:在不同vlan中实现互联互通
实验环境:在GNS3软件中实现
具体实验步骤如下:
1:打开GNS3,创建如下图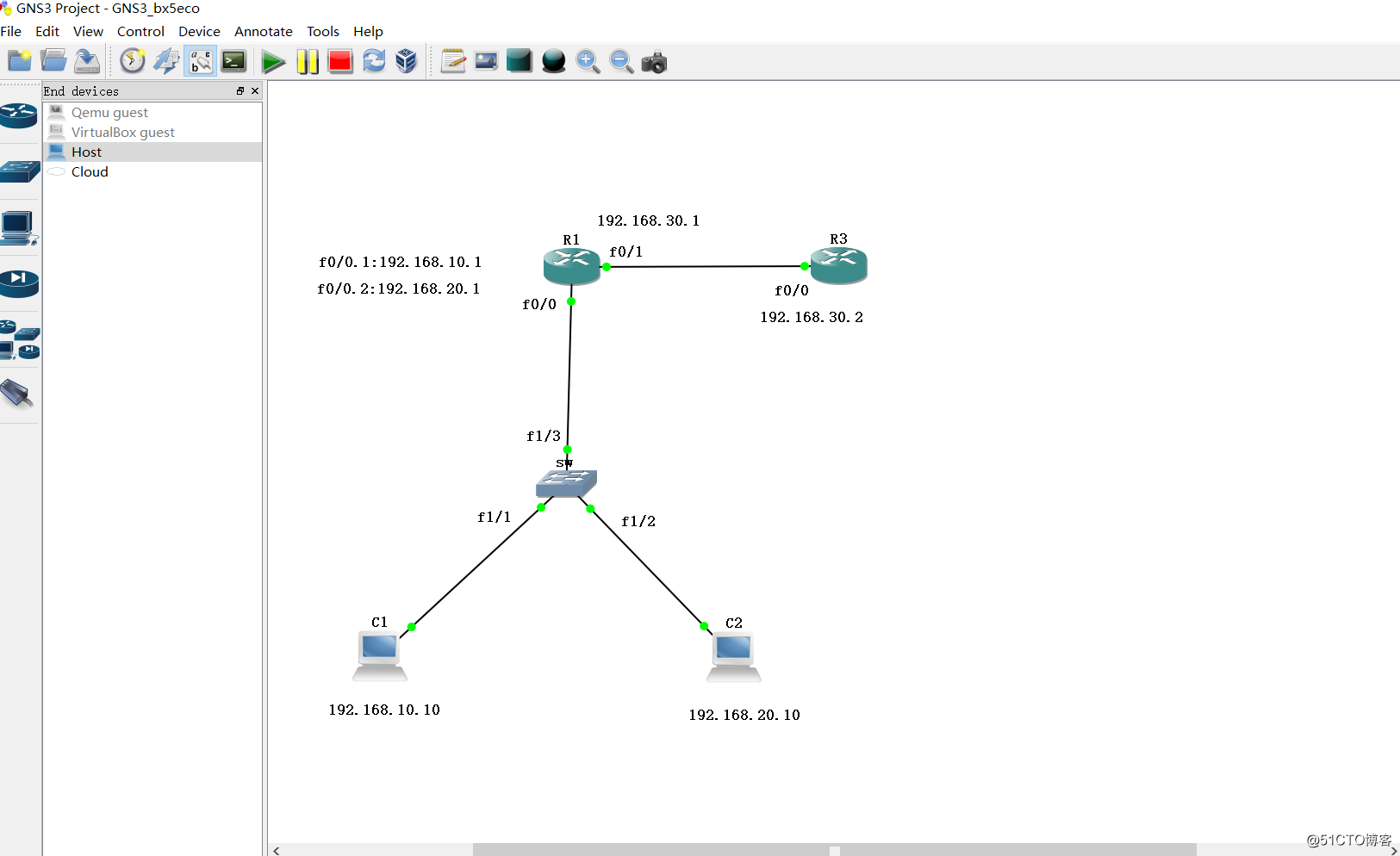
创建两个路由,一个交换机,两个PC机。
2:双击sw(交换机:由路由转变而来,并加三层单板)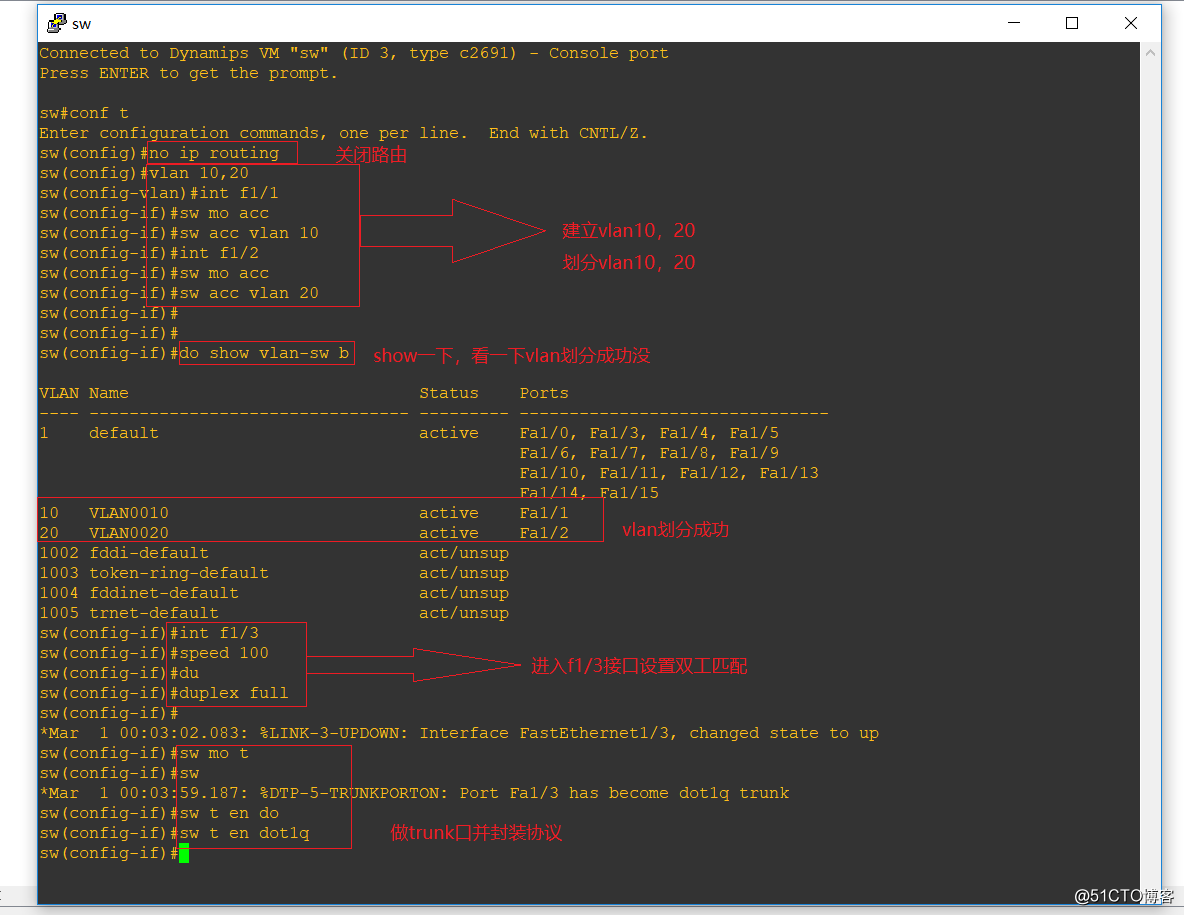
创建vlan10,20,并划分vlan,给上行端口设置双工匹配并做trunk封装协议。
3:双击R1(路由器1)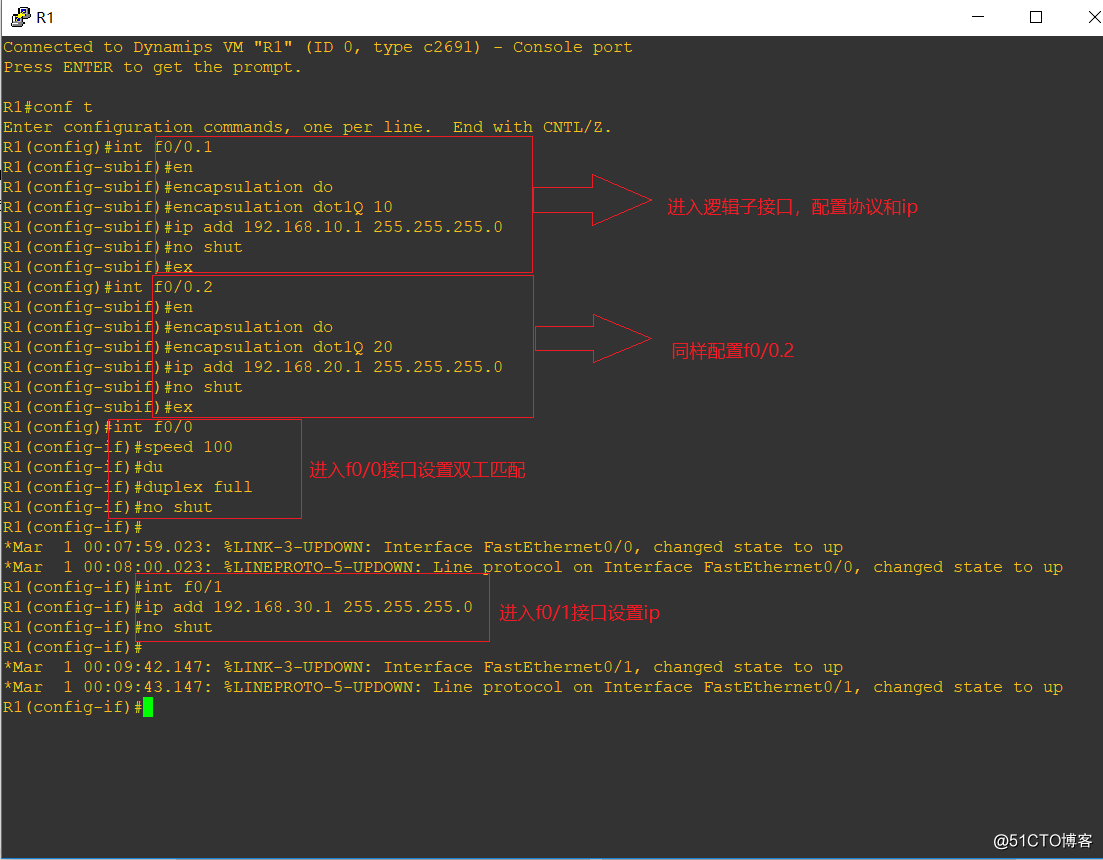
进入两个逻辑子接口配置IP,并设置双工,给f0/1接口设置一个IP,打开接口就行了。
4:双击R2(路由器2)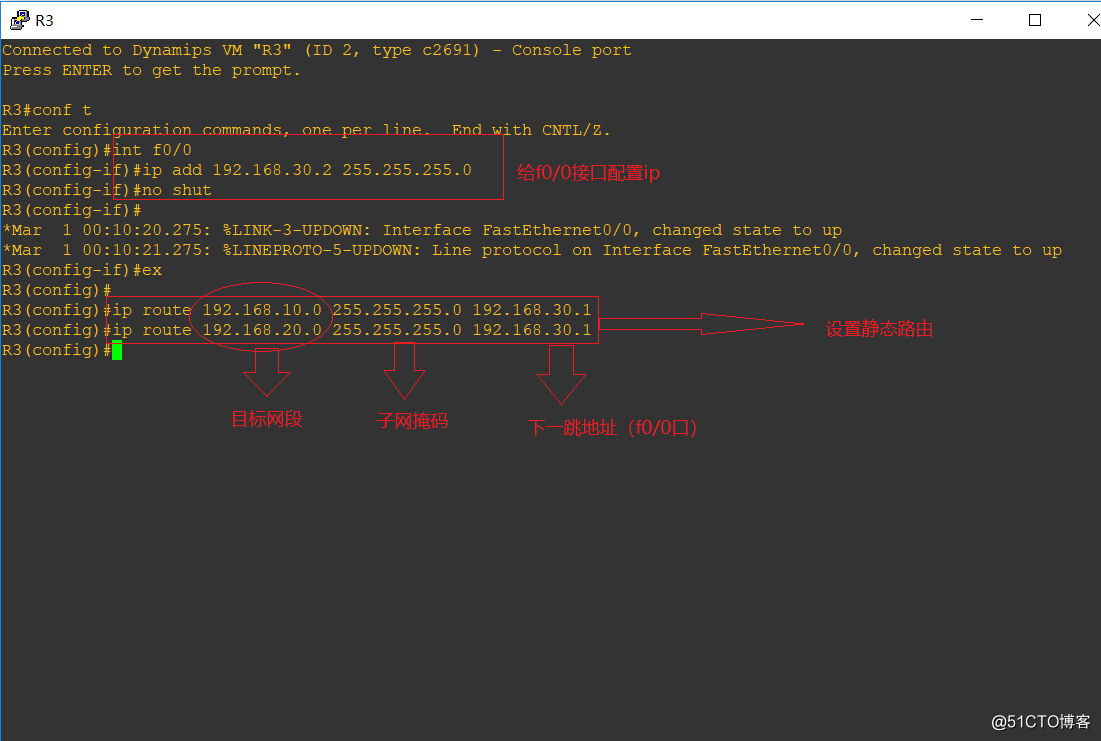
接口配IP,设置静态路由。
5打开Tools下面的VPCS(为PC1/PC2设置IP)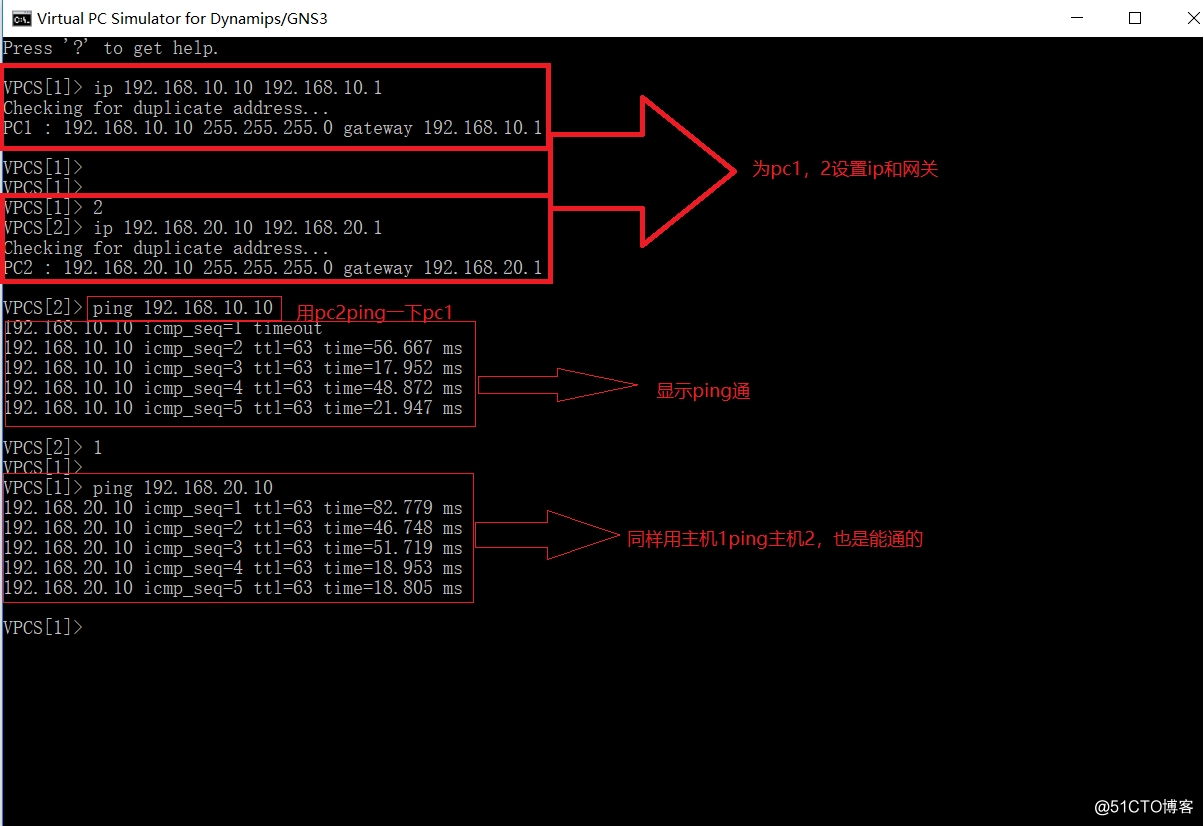
给PC1,PC2设置IP,用ping命令查看是否互联互通。
结论:
通过最后一图的PC1和PC2互通互联可以看出本实验已经成功。
原文:http://blog.51cto.com/13756916/2135233