罗德里格斯旋转公式是通过反对称矩阵求旋转矩阵的方法,起初我在看别人写的姿态解算分析文章里看到,他的推导如下:关于罗德里格斯公式的简单推导
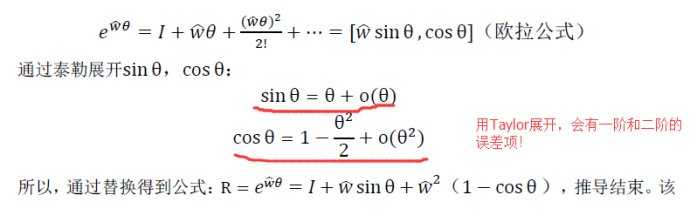
请注意我做标记的地方,我刚开始一直不明白这种推导,这样会有误差的推导,难道罗德里格斯公式是对旋转矩阵R的近似?这样做并不好,反而会使解算的姿态更不准确,后来在群里讨论这个问题,有大神给我解惑了。
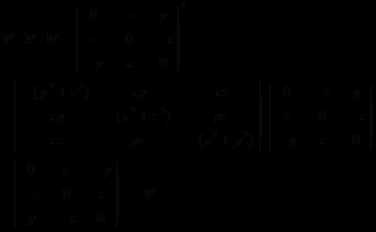
首先我们明白这是一个SO(3)到SO(3)的李群的映射。不要担心自己不知道李群是什么,因为我们下面的推导会非常简单!首先我们来看什么是反对称矩阵,在这之前,先展示它和向量叉乘的关系:

这是一个简单的叉乘运算,下面看看我们的反对称矩阵运算:
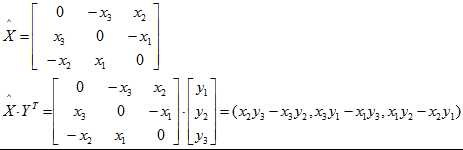
所以我们得出:

我们知道我们的旋转矩阵R和我们的三角函数的关系,这里就不多说了,所以现在我们来看一个反对称矩阵的性质,首先定义一个反对称矩阵:
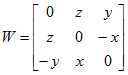
同时我们有如下的约束:
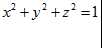
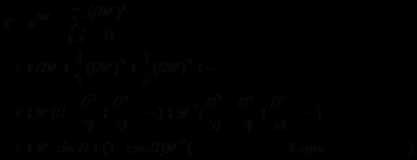
现在我们可以看到我们的反对称阵有如下性质:
现在可以进行我们的罗德里格斯公式推导了:
关于罗德里格斯公式的简单推导

引自:http://blog.sina.com.cn/s/blog_ea828d2a0102wlk6.html
原文:https://www.cnblogs.com/ymd12103410/p/9726977.html