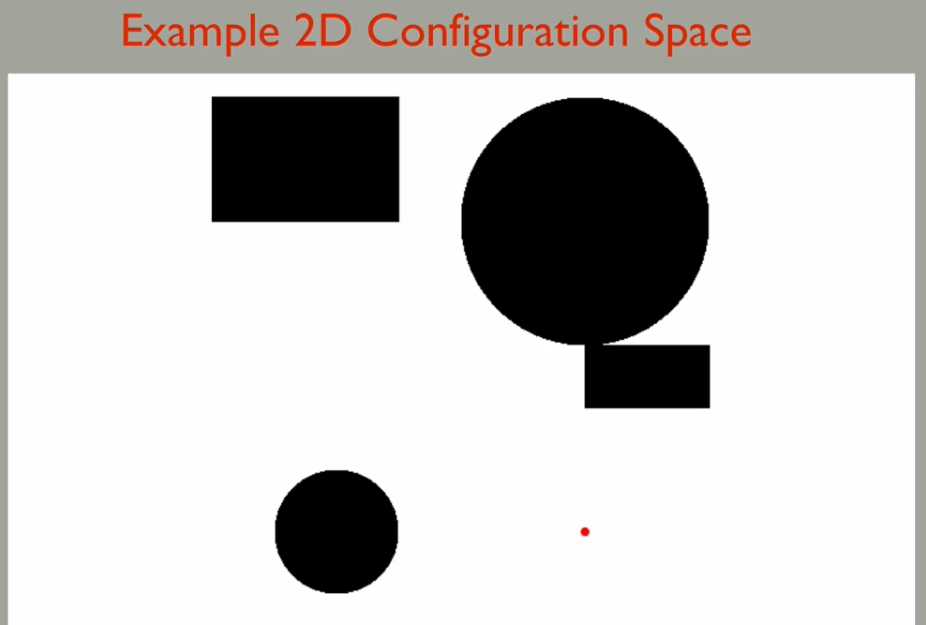
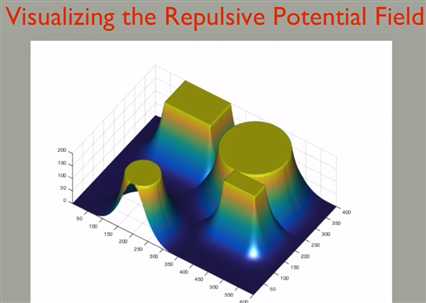
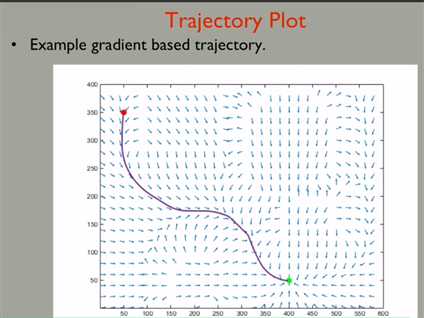
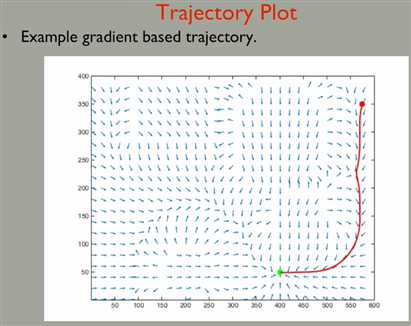
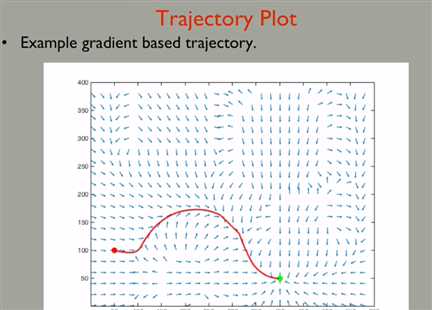
The basic idea here is to try to construct a smooth function over the extent of the configuration space, which has high values when the robot is near to an obstacle and lower values when it‘s further away.
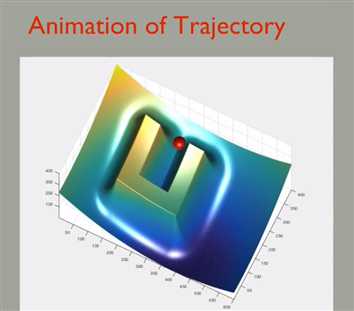
If we can construct such a function, we can use it‘s gradient to guide the robot to the desired configuration.
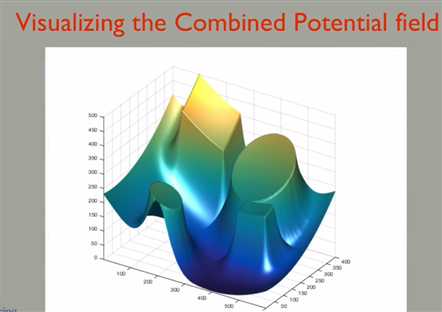
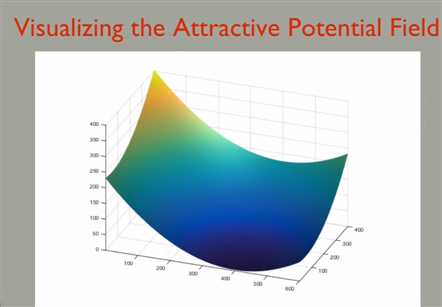 bowl-like shape
bowl-like shape
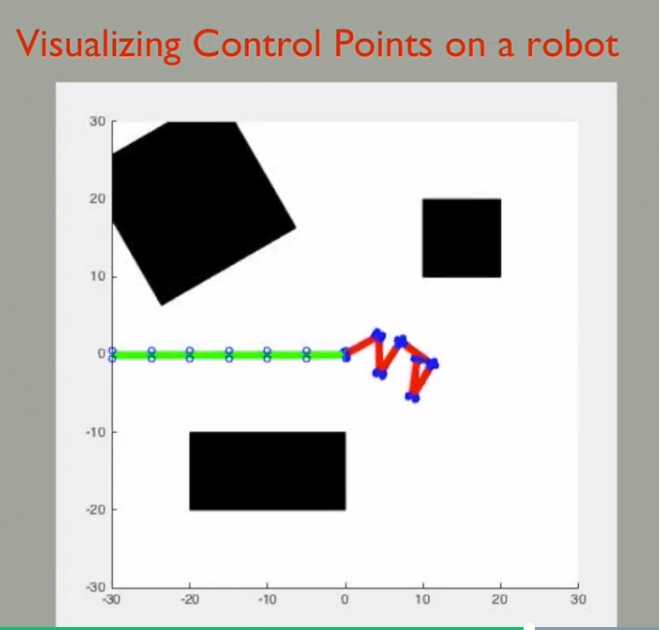
This is sometimes referred to as sensor based planning
laser sensor,...rangefinder
In fact, they can incorporated into real time control schemes, running at tens of hertz using local sensor data
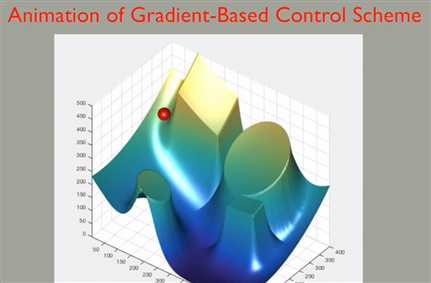
downside is local minima
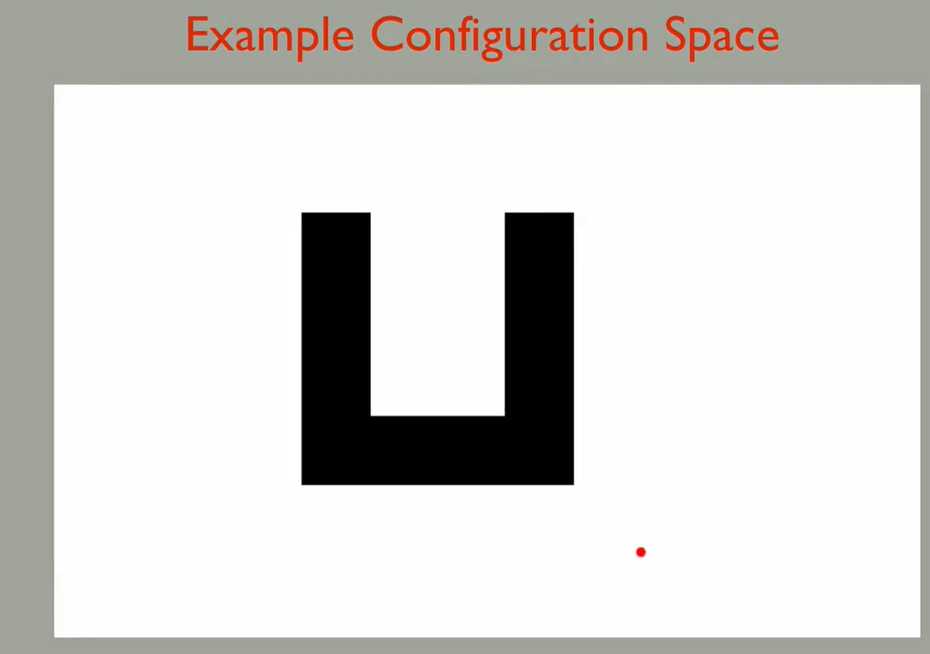
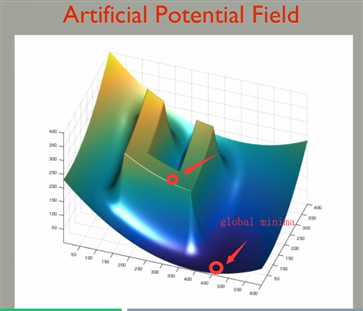
hard to know local minima in advance
One way to view these artificial potential field based schemes is as a useful heuristic.
the use of a back tracking procedure to detect these situation
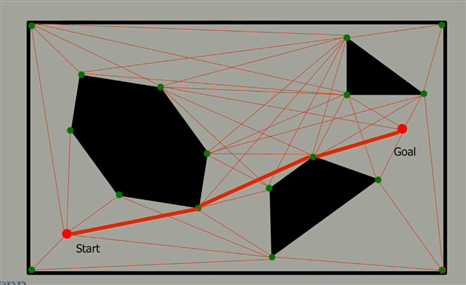
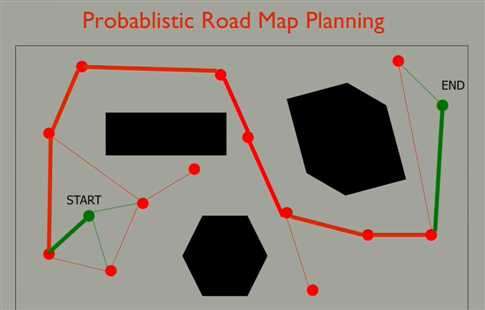
visible graph approach 1
trapezoidal decomposition approach 2
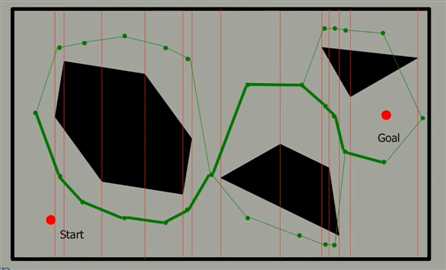
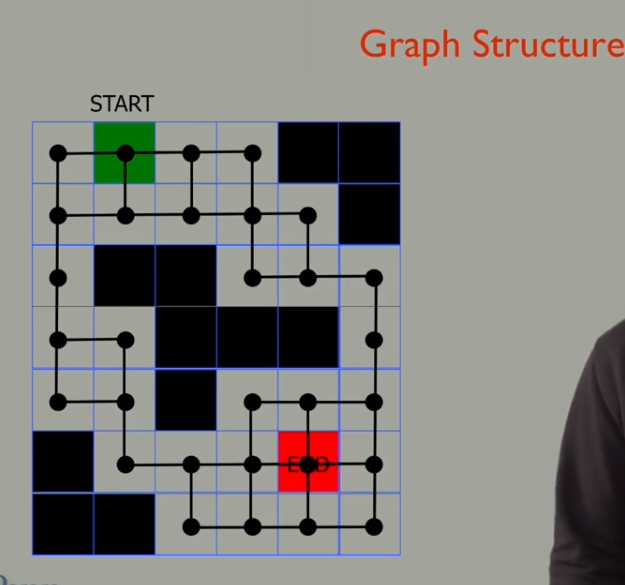
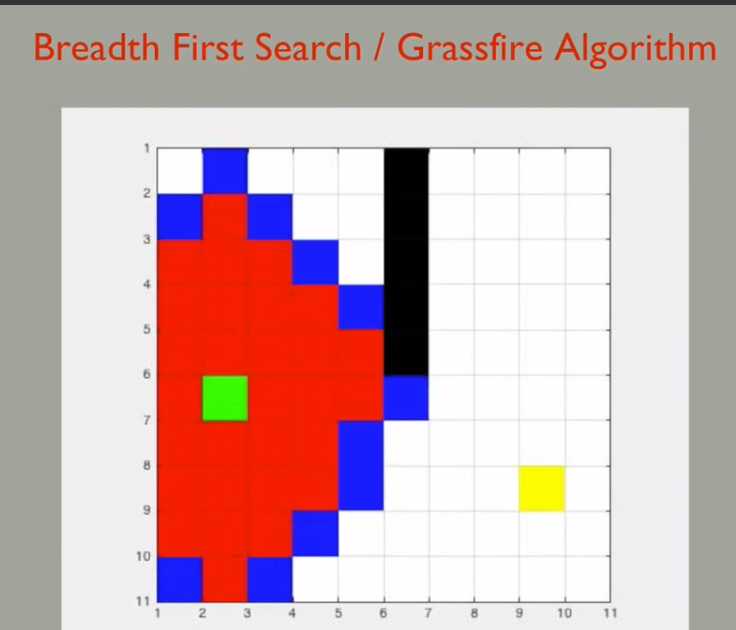
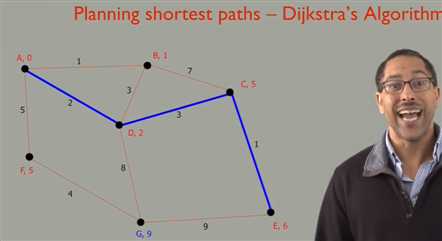
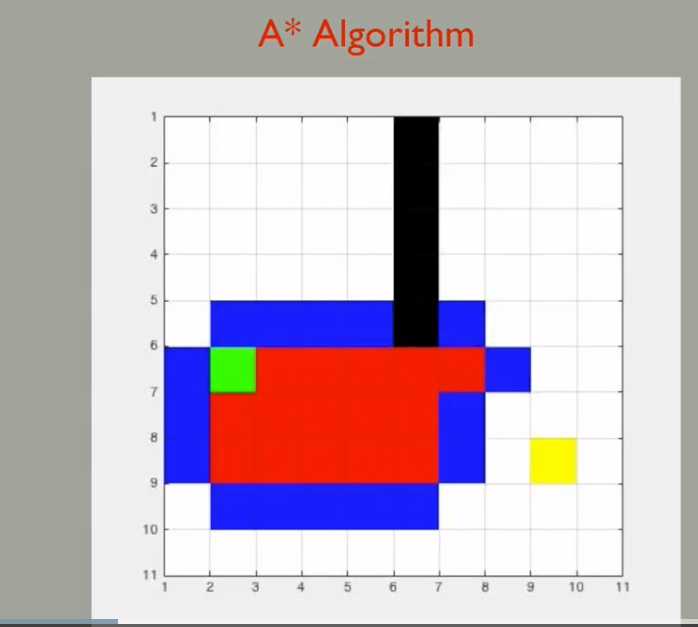
grid based approach 3
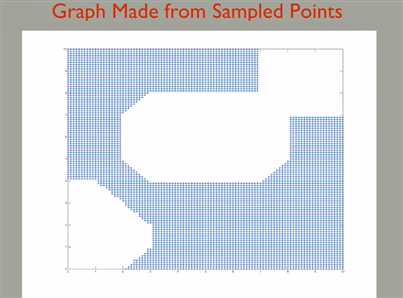
上面: discretize space and use dijkstra
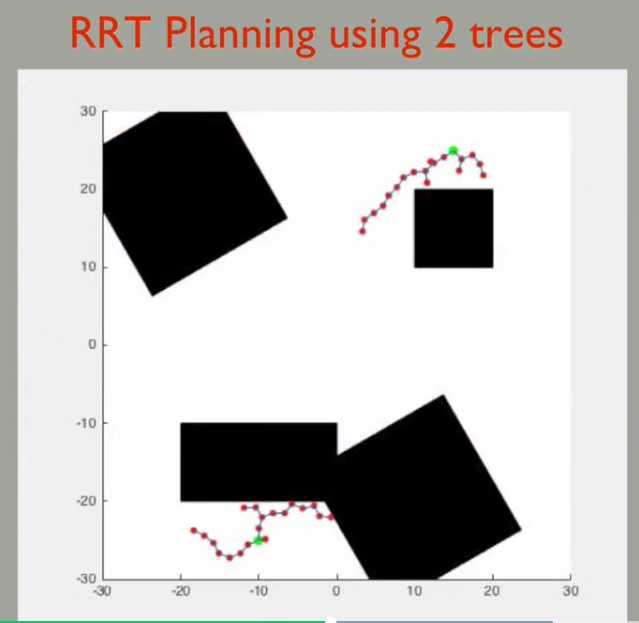
下面:Tree search
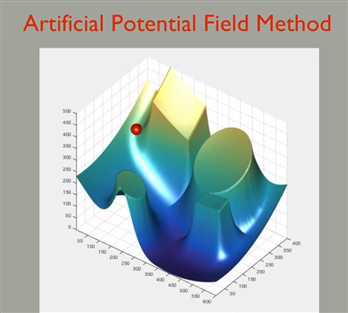
UPenn - Robotics 2:Computational Motion Planning - week 4: Artificial Potential Field Methods
原文:https://www.cnblogs.com/ecoflex/p/9790137.html