今天我们会来说说强化学习中一个和 Q learning 类似的算法, 叫做 Sarsa.
注: 本文不会涉及数学推导. 大家可以在很多其他地方找到优秀的数学推导文章.

在强化学习中 Sarsa 和 Q learning 及其类似, 这节内容会基于之前我们所讲的 Q learning. 所以还不熟悉 Q learning 的朋友们, 请前往我制作的 Q learning 简介 (知乎专栏). 我们会对比 Q learning, 来看看 Sarsa 是特殊在哪些方面. 和上次一样, 我们还是使用写作业和看电视这个例子. 没写完作业去看电视被打, 写完了作业有糖吃.
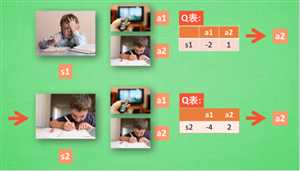
Sarsa 的决策部分和 Q learning 一模一样, 因为我们使用的是 Q 表的形式决策, 所以我们会在 Q 表中挑选值较大的动作值施加在环境中来换取奖惩. 但是不同的地方在于 Sarsa 的更新方式是不一样的.
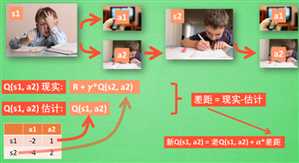
同样, 我们会经历正在写作业的状态 s1, 然后再挑选一个带来最大潜在奖励的动作 a2, 这样我们就到达了 继续写作业状态 s2, 而在这一步, 如果你用的是 Q learning, 你会观看一下在 s2 上选取哪一个动作会带来最大的奖励, 但是在真正要做决定时, 却不一定会选取到那个带来最大奖励的动作, Q-learning 在这一步只是估计了一下接下来的动作值. 而 Sarsa 是实践派, 他说到做到, 在 s2 这一步估算的动作也是接下来要做的动作. 所以 Q(s1, a2) 现实的计算值, 我们也会稍稍改动, 去掉maxQ, 取而代之的是在 s2 上我们实实在在选取的 a2 的 Q 值. 最后像 Q learning 一样, 求出现实和估计的差距 并更新 Q 表里的 Q(s1, a2).
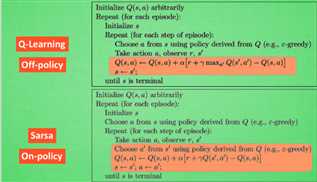
从算法来看, 这就是他们两最大的不同之处了. 因为 Sarsa 是说到做到型, 所以我们也叫他 on-policy, 在线学习, 学着自己在做的事情. 而 Q learning 是说到但并不一定做到, 所以它也叫作 Off-policy, 离线学习. 而因为有了 maxQ, Q-learning 也是一个特别勇敢的算法.
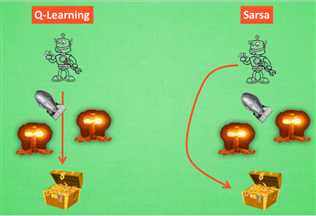
为什么说他勇敢呢, 因为 Q learning 机器人 永远都会选择最近的一条通往成功的道路, 不管这条路会有多危险. 而 Sarsa 则是相当保守, 他会选择离危险远远的, 拿到宝藏是次要的, 保住自己的小命才是王道. 这就是使用 Sarsa 方法的不同之处.
这次我们用同样的迷宫例子来实现 RL 中另一种和 Qlearning 类似的算法, 叫做 Sarsa (state-action-reward-state_-action_). 我们从这一个简称可以了解到, Sarsa 的整个循环都将是在一个路径上, 也就是 on-policy, 下一个 state_, 和下一个 action_ 将会变成他真正采取的 action 和 state. 和 Qlearning 的不同之处就在这. Qlearning 的下个一个 state_ action_ 在算法更新的时候都还是不确定的 (off-policy). 而 Sarsa 的 state_, action_ 在这次算法更新的时候已经确定好了 (on-policy).
整个算法还是一直不断更新 Q table 里的值, 然后再根据新的值来判断要在某个 state 采取怎样的 action. 不过于 Qlearning 不同之处:
state 已经想好了 state 对应的 action, 而且想好了 下一个 state_ 和下一个 action_ (Qlearning 还没有想好下一个 action_)Q(s,a) 的时候基于的是下一个 Q(s_, a_) (Qlearning 是基于 maxQ(s_))这种不同之处使得 Sarsa 相对于 Qlearning, 更加的胆小. 因为 Qlearning 永远都是想着 maxQ 最大化, 因为这个 maxQ 而变得贪婪, 不考虑其他非 maxQ 的结果. 我们可以理解成 Qlearning 是一种贪婪, 大胆, 勇敢的算法, 对于错误, 死亡并不在乎. 而 Sarsa 是一种保守的算法, 他在乎每一步决策, 对于错误和死亡比较铭感. 这一点我们会在可视化的部分看出他们的不同. 两种算法都有他们的好处, 比如在实际中, 你比较在乎机器的损害, 用一种保守的算法, 在训练时就能减少损坏的次数.
首先我们先 import 两个模块, maze_env 是我们的环境模块, 已经编写好了, 大家可以直接在这里下载, maze_env 模块我们可以不深入研究, 如果你对编辑环境感兴趣, 可以去看看如何使用 python 自带的简单 GUI 模块 tkinter 来编写虚拟环境. 我也有对应的教程. maze_env 就是用 tkinter 编写的. 而 RL_brain 这个模块是 RL 的大脑部分, 我们下节会讲.
from maze_env import Maze from RL_brain import SarsaTable
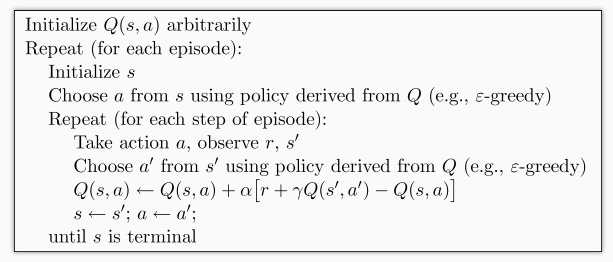
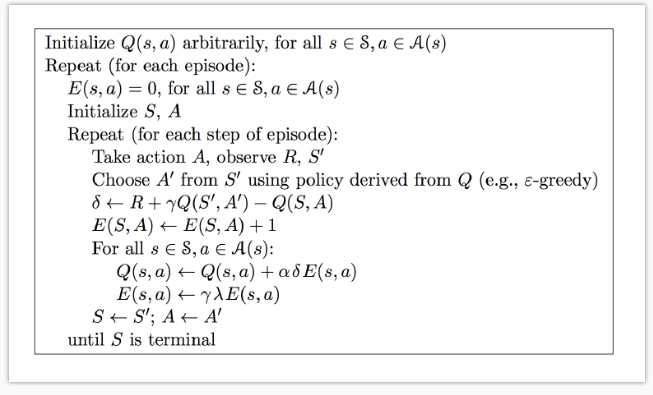
下面的代码, 我们可以根据上面的图片中的算法对应起来, 这就是整个 Sarsa 最重要的迭代更新部分啦.
def update(): for episode in range(100): # 初始化环境 observation = env.reset() # Sarsa 根据 state 观测选择行为 action = RL.choose_action(str(observation)) while True: # 刷新环境 env.render() # 在环境中采取行为, 获得下一个 state_ (obervation_), reward, 和是否终止 observation_, reward, done = env.step(action) # 根据下一个 state (obervation_) 选取下一个 action_ action_ = RL.choose_action(str(observation_)) # 从 (s, a, r, s, a) 中学习, 更新 Q_tabel 的参数 ==> Sarsa RL.learn(str(observation), action, reward, str(observation_), action_) # 将下一个当成下一步的 state (observation) and action observation = observation_ action = action_ # 终止时跳出循环 if done: break # 大循环完毕 print(‘game over‘) env.destroy() if __name__ == "__main__": env = Maze() RL = SarsaTable(actions=list(range(env.n_actions))) env.after(100, update) env.mainloop()
接着上节内容, 我们来实现 RL_brain 的 SarsaTable 部分, 这也是 RL 的大脑部分, 负责决策和思考.
和之前定义 Qlearning 中的 QLearningTable 一样, 因为使用 tabular 方式的 Sarsa 和 Qlearning 的相似度极高,
class SarsaTable:
# 初始化 (与之前一样)
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
# 选行为 (与之前一样)
def choose_action(self, observation):
# 学习更新参数 (有改变)
def learn(self, s, a, r, s_):
# 检测 state 是否存在 (与之前一样)
def check_state_exist(self, state):
我们甚至可以定义一个 主class RL, 然后将 QLearningTable 和 SarsaTable 作为 主class RL 的衍生, 这个主 RL 可以这样定义. 所以我们将之前的 __init__, check_state_exist, choose_action, learn 全部都放在这个主结构中, 之后根据不同的算法更改对应的内容就好了.
import numpy as np
import pandas as pd
class RL(object):
def __init__(self, action_space, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
... # 和 QLearningTable 中的代码一样
def check_state_exist(self, state):
... # 和 QLearningTable 中的代码一样
def choose_action(self, observation):
... # 和 QLearningTable 中的代码一样
def learn(self, *args):
pass # 每种的都有点不同, 所以用 pass
如果是这样定义父类的 RL class, 通过继承关系, 那之子类 QLearningTable class 就能简化成这样:
class QLearningTable(RL): # 继承了父类 RL
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
super(QLearningTable, self).__init__(actions, learning_rate, reward_decay, e_greedy) # 表示继承关系
def learn(self, s, a, r, s_): # learn 的方法在每种类型中有不一样, 需重新定义
self.check_state_exist(s_)
q_predict = self.q_table.loc[s, a]
if s_ != ‘terminal‘:
q_target = r + self.gamma * self.q_table.loc[s_, :].max()
else:
q_target = r
self.q_table.loc[s, a] += self.lr * (q_target - q_predict)
有了父类的 RL, 我们这次的编写就很简单, 只需要编写 SarsaTable 中 learn 这个功能就完成了. 因为其他功能都和父类是一样的. 这就是我们所有的 SarsaTable 于父类 RL 不同之处的代码. 是不是很简单.
class SarsaTable(RL): # 继承 RL class
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
super(SarsaTable, self).__init__(actions, learning_rate, reward_decay, e_greedy) # 表示继承关系
def learn(self, s, a, r, s_, a_):
self.check_state_exist(s_)
q_predict = self.q_table.loc[s, a]
if s_ != ‘terminal‘:
q_target = r + self.gamma * self.q_table.loc[s_, a_] # q_target 基于选好的 a_ 而不是 Q(s_) 的最大值
else:
q_target = r # 如果 s_ 是终止符
self.q_table.loc[s, a] += self.lr * (q_target - q_predict) # 更新 q_table
今天我们会来说说强化学习中基于 Sarsa 的一种提速方法, 叫做 sarsa-lambda.
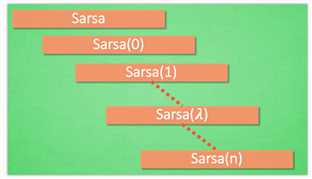
通过上个视频的介绍, 我们知道这个 [Sarsa]/tutorials/machine-learning/ML-intro/4-04-sarsa/)) 的算法是一种在线学习法, on-policy. 但是这个 lambda 到底是什么. 其实吧, Sarsa 是一种单步更新法, 在环境中每走一步, 更新一次自己的行为准则, 我们可以在这样的 Sarsa 后面打一个括号, 说他是 Sarsa(0), 因为他等走完这一步以后直接更新行为准则. 如果延续这种想法, 走完这步, 再走一步, 然后再更新, 我们可以叫他 Sarsa(1). 同理, 如果等待回合完毕我们一次性再更新呢, 比如这回合我们走了 n 步, 那我们就叫 Sarsa(n). 为了统一这样的流程, 我们就有了一个 lambda 值来代替我们想要选择的步数, 这也就是 Sarsa(lambda) 的由来. 我们看看最极端的两个例子, 对比单步更新和回合更新, 看看回合更新的优势在哪里.

虽然我们每一步都在更新, 但是在没有获取宝藏的时候, 我们现在站着的这一步也没有得到任何更新, 也就是直到获取宝藏时, 我们才为获取到宝藏的上一步更新为: 这一步很好, 和获取宝藏是有关联的, 而之前为了获取宝藏所走的所有步都被认为和获取宝藏没关系. 回合更新虽然我要等到这回合结束, 才开始对本回合所经历的所有步都添加更新, 但是这所有的步都是和宝藏有关系的, 都是为了得到宝藏需要学习的步, 所以每一个脚印在下回合被选则的几率又高了一些. 在这种角度来看, 回合更新似乎会有效率一些.
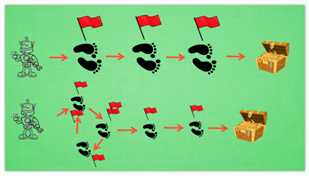
我们看看这种情况, 还是使用单步更新的方法在每一步都进行更新, 但是同时记下之前的寻宝之路. 你可以想像, 每走一步, 插上一个小旗子, 这样我们就能清楚的知道除了最近的一步, 找到宝物时还需要更新哪些步了. 不过, 有时候情况可能没有这么乐观. 开始的几次, 因为完全没有头绪, 我可能在原地打转了很久, 然后才找到宝藏, 那些重复的脚步真的对我拿到宝藏很有必要吗? 答案我们都知道. 所以Sarsa(lambda)就来拯救你啦.
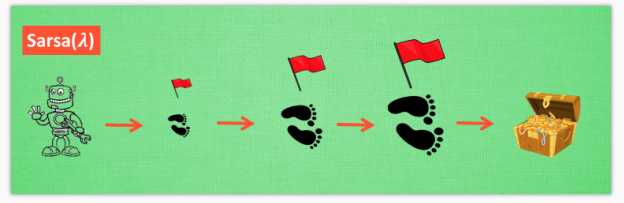
其实 lambda 就是一个衰变值, 他可以让你知道离奖励越远的步可能并不是让你最快拿到奖励的步, 所以我们想象我们站在宝藏的位置, 回头看看我们走过的寻宝之路, 离宝藏越近的脚印越看得清, 远处的脚印太渺小, 我们都很难看清, 那我们就索性记下离宝藏越近的脚印越重要, 越需要被好好的更新. 和之前我们提到过的 奖励衰减值 gamma 一样, lambda 是脚步衰减值, 都是一个在 0 和 1 之间的数.
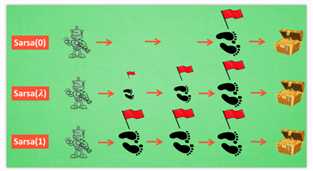
当 lambda 取0, 就变成了 Sarsa 的单步更新, 当 lambda 取 1, 就变成了回合更新, 对所有步更新的力度都是一样. 当 lambda 在 0 和 1 之间, 取值越大, 离宝藏越近的步更新力度越大. 这样我们就不用受限于单步更新的每次只能更新最近的一步, 我们可以更有效率的更新所有相关步了.
Sarsa-lambda 是基于 Sarsa 方法的升级版, 他能更有效率地学习到怎么样获得好的 reward. 如果说 Sarsa 和 Qlearning 都是每次获取到 reward, 只更新获取到 reward 的前一步. 那 Sarsa-lambda 就是更新获取到 reward 的前 lambda 步. lambda 是在 [0, 1] 之间取值,
如果 lambda = 0, Sarsa-lambda 就是 Sarsa, 只更新获取到 reward 前经历的最后一步.
如果 lambda = 1, Sarsa-lambda 更新的是 获取到 reward 前所有经历的步.
这样解释起来有点抽象, 还是建议大家观看我制作的 什么是 Sarsa-lambda 短视频, 用动画展示具体的区别.
使用 SarsaLambdaTable 在算法更新迭代的部分, 是和之前的 SarsaTable 一样的, 所以这一节, 我们没有算法更新部分, 直接变成 思维决策部分.
class SarsaLambdaTable:
# 初始化 (有改变)
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9, trace_decay=0.9):
# 选行为 (与之前一样)
def choose_action(self, observation):
# 学习更新参数 (有改变)
def learn(self, s, a, r, s_):
# 检测 state 是否存在 (有改变)
def check_state_exist(self, state):
同样, 我们选择继承的方式, 将 SarsaLambdaTable 继承到 RL, 所以我们将之前的 __init__, check_state_exist, choose_action, learn 全部都放在这个主结构中, 之后根据不同的算法更改对应的内容就好了. 所以还没弄懂这些功能的朋友们, 请回到之前的教程再看一遍.
算法的相应更改请参考这个:
在预设值当中, 我们添加了 trace_decay=0.9 这个就是 lambda 的值了. 这个值将会使得拿到 reward 前的每一步都有价值. 如果还不太明白其他预设值的意思, 请查看我的 关于强化学习的短视频列表
class SarsaLambdaTable(RL): # 继承 RL class
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9, trace_decay=0.9):
super(SarsaLambdaTable, self).__init__(actions, learning_rate, reward_decay, e_greedy)
# 后向观测算法, eligibility trace.
self.lambda_ = trace_decay
self.eligibility_trace = self.q_table.copy() # 空的 eligibility trace 表
check_state_exist 和之前的是高度相似的. 唯一不同的地方是我们考虑了 eligibility_trace,
class SarsaLambdaTable(RL): # 继承 RL class
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9, trace_decay=0.9):
...
def check_state_exist(self, state):
if state not in self.q_table.index:
# append new state to q table
to_be_append = pd.Series(
[0] * len(self.actions),
index=self.q_table.columns,
name=state,
)
self.q_table = self.q_table.append(to_be_append)
# also update eligibility trace
self.eligibility_trace = self.eligibility_trace.append(to_be_append)
有了父类的 RL, 我们这次的编写就很简单, 只需要编写 SarsaLambdaTable 中 learn 这个功能就完成了. 因为其他功能都和父类是一样的. 这就是我们所有的 SarsaLambdaTable 于父类 RL 不同之处的代码. 是不是很简单.
class SarsaLambdaTable(RL): # 继承 RL class
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9, trace_decay=0.9):
...
def check_state_exist(self, state):
...
def learn(self, s, a, r, s_, a_):
# 这部分和 Sarsa 一样
self.check_state_exist(s_)
q_predict = self.q_table.ix[s, a]
if s_ != ‘terminal‘:
q_target = r + self.gamma * self.q_table.ix[s_, a_]
else:
q_target = r
error = q_target - q_predict
# 这里开始不同:
# 对于经历过的 state-action, 我们让他+1, 证明他是得到 reward 路途中不可或缺的一环
self.eligibility_trace.ix[s, a] += 1
# Q table 更新
self.q_table += self.lr * error * self.eligibility_trace
# 随着时间衰减 eligibility trace 的值, 离获取 reward 越远的步, 他的"不可或缺性"越小
self.eligibility_trace *= self.gamma*self.lambda_
除了图中和上面代码这种更新方式, 还有一种会更加有效率. 我们可以将上面的这一步替换成下面这样:
# 上面代码中的方式: self.eligibility_trace.ix[s, a] += 1 # 更有效的方式: self.eligibility_trace.ix[s, :] *= 0 self.eligibility_trace.ix[s, a] = 1
他们两的不同之处可以用这张图来概括:
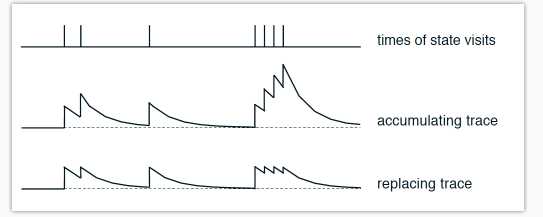
这是针对于一个 state-action 值按经历次数的变化. 最上面是经历 state-action 的时间点, 第二张图是使用这种方式所带来的 “不可或缺性值”:
self.eligibility_trace.ix[s, a] += 1
下面图是使用这种方法带来的 “不可或缺性值”:
self.eligibility_trace.ix[s, :] *= 0; self.eligibility_trace.ix[s, a] = 1
实验证明选择下面这种方法会有更好的效果. 大家也可以自己玩一玩, 试试两种方法的不同表现.
最后不要忘了, eligibility trace 只是记录每个回合的每一步, 新回合开始的时候需要将 Trace 清零.
for episode in range(100):
...
# 新回合, 清零
RL.eligibility_trace *= 0
while True: # 开始回合
...
原文:https://www.cnblogs.com/Mjerry/p/9961071.html