(一)PID控制算法(P:比例 I:积分 D:微分)
(二)首先先说明原理,使用的是数字PID算法,模拟PID算法在计算机这样的系统中是不能够直接使用的,数字PID算法又分为位置式PID控制算法和增量式PID控制算法,那么下面从原理上说明这两种算法
(三)原理分析如图
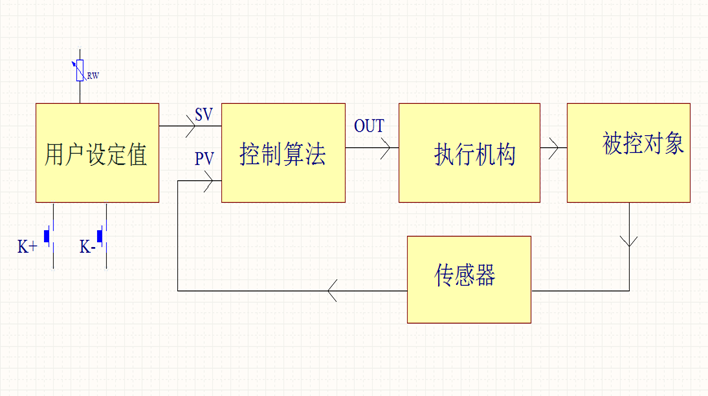
(四)从上面图中我们可以得到定义
定义变量
用户设定值: SV
当前值(实际值): PV
偏差: E = SV - PV
(五)如果我们在一段时间内就从传感器读取一个值,那么我们就可以得到一个实际值的数据序列,,那么我们也会得到一个偏差值的序列
读取时间: t(1) t(2) ------ t(k-1) t(k) 读取到的值: X(1) X(2) ------ X(k-1) X(k)
偏差值: E(1) E(2) ------ E(k-1) E(k)
那么我们从偏差值中可以知道: E(X) > 0 说明未达标
E(X) = 0 说明正好达标
E(X) < 0 说明超标
原文:https://www.cnblogs.com/luxiaoguogege/p/10230369.html