一,基础矩阵原理介绍
如果已知基础矩阵F,以及一个3D点在一个像面上的像素坐标p,则可以求得在另一个像面上的像素坐标p‘,这个是基础矩阵的作用,可以表征两个相机的相对位置及相机内参数。
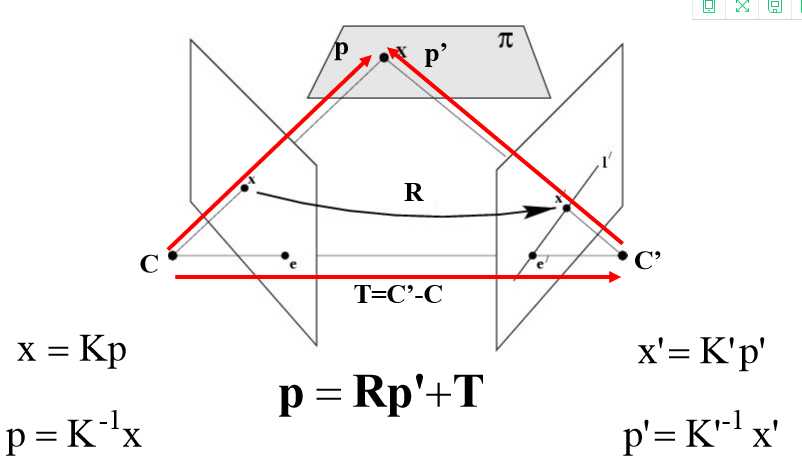
则根据三线共面,有:

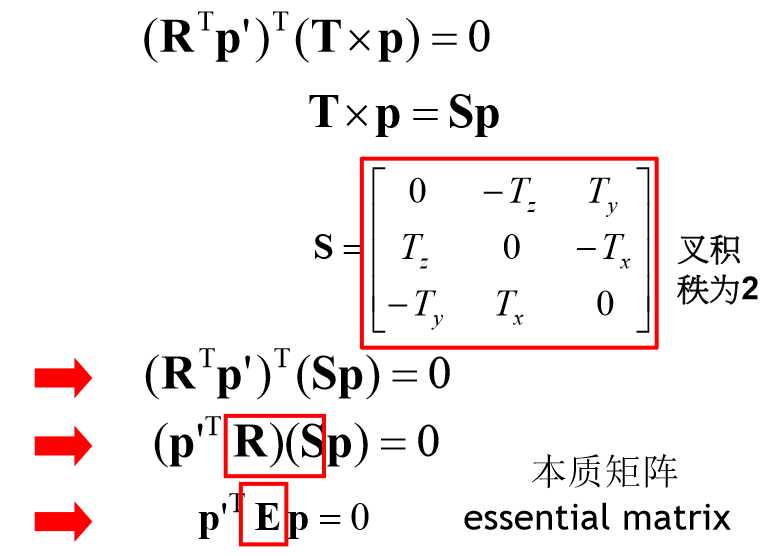

K和K‘分别为两个相机的内参矩阵,则:
![]()
其中的F即为基础矩阵,描述了空间中的点在两个像平面中的坐标对应关系。
基础矩阵是对极几何的代数表达方式,描述了图像中任意对应点 x↔x’ 之间的约束关系。F 为 3x3 矩阵,秩为2,对任意匹配点对 x↔x’ 均满足: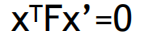
二,基础矩阵的两大作用是简化匹配去除错配特征
原文:https://www.cnblogs.com/silencexiaoyou/p/10726888.html