接着上一节,这节来实现控制LED的亮灭操作:
一、驱动框架
#include <linux/fs.h> #include <linux/init.h> /* 定义文件内私有结构体 */ struct led_device { struct cdev cdev; int stat; /* 用于保存LED状态,0为灭,1为亮 */ }; /* LED write()函数 */ static ssize_t led_write(struct file *filep, const char __user * buf, size_t len, loff_t *ppos) { return 0; } /* LED open()函数 */ static int led_open(struct inode *inodep, struct file *filep) { return 0; } /* 把定义的函数接口集合起来,方便系统调用 */ static const struct file_operations led_fops = { .open = led_open, .write = led_write, }; /* 把集合起来的函数接口告诉系统,同时使用111作为该设备的字符设备号 */ static int __init led_init(void) { return 0; } /* 从系统中卸载掉字符设备号为111的设备 */ static void __exit led_exit(void) { } /* 声明段属性 */ module_init(led_init); module_exit(led_exit); MODULE_LICENSE("GPL");
我们在驱动程序实现的write()和open()函数的格式必须遵循struct file_operations里面的函数指针:
struct file_operations { struct module *owner; loff_t (*llseek) (struct file *, loff_t, int); ssize_t (*read) (struct file *, char __user *, size_t, loff_t *); ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *); ssize_t (*aio_read) (struct kiocb *, const struct iovec *, unsigned long, loff_t); ssize_t (*aio_write) (struct kiocb *, const struct iovec *, unsigned long, loff_t); int (*readdir) (struct file *, void *, filldir_t); unsigned int (*poll) (struct file *, struct poll_table_struct *); long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long); long (*compat_ioctl) (struct file *, unsigned int, unsigned long); int (*mmap) (struct file *, struct vm_area_struct *); int (*open) (struct inode *, struct file *); int (*flush) (struct file *, fl_owner_t id); int (*release) (struct inode *, struct file *); ... };
通常我们不会实现struct file_operations里面的所有函数,只会实现一些针对某些设备需要用到的函数
驱动中定义的led_init()和led_exit()函数会用于向上层注册字符设备、struct file_operations等
这两个函数所使用到的__init和__exit,在此只以__init为例展开:
#define __init __attribute__((".init.text")) \ __attribute__((__cold__)) __attribute__((no_instrument_function))
可以看到led_init()函数代码会被定位到.init.text段中
这个段定义在include/asm-generic/vmlinux.lds.h中
#define INIT_TEXT_SECTION(inittext_align) \ . = ALIGN(inittext_align); .init.text : AT(ADDR(.init.text) - LOAD_OFFSET) { VMLINUX_SYMBOL(_sinittext) = .; INIT_TEXT VMLINUX_SYMBOL(_einittext) = .; }
在arch/arm/kernel/vmlinux.lds.S中使用
INIT_TEXT_SECTION(8)
驱动程序中调用的module_init()和module_exit()函数用于向上层注册led_init()和led_exit()
#define module_init(x) __initcall(x) #define __initcall(fn) device_initcall(fn) ... #define core_initcall(fn) __define_initcall("1",fn,1) #define core_initcall_sync(fn) __define_initcall("1s",fn,1s) #define postcore_initcall(fn) __define_initcall("2",fn,2) #define postcore_initcall_sync(fn) __define_initcall("2s",fn,2s) #define arch_initcall(fn) __define_initcall("3",fn,3) #define arch_initcall_sync(fn) __define_initcall("3s",fn,3s) #define subsys_initcall(fn) __define_initcall("4",fn,4) #define subsys_initcall_sync(fn) __define_initcall("4s",fn,4s) #define fs_initcall(fn) __define_initcall("5",fn,5) #define fs_initcall_sync(fn) __define_initcall("5s",fn,5s) #define rootfs_initcall(fn) __define_initcall("rootfs",fn,rootfs) #define device_initcall(fn) __define_initcall("6",fn,6) #define device_initcall_sync(fn) __define_initcall("6s",fn,6s) #define late_initcall(fn) __define_initcall("7",fn,7) #define late_initcall_sync(fn) __define_initcall("7s",fn,7s) ... #define __define_initcall(fn, id) static initcall_t __initcall_##fn##id __used __attribute__((__section__(".initcall" #id ".init"))) = fn; LTO_REFERENCE_INITCALL(__initcall_##fn##id)
最终,led_init()函数的地址会被定位到.initcall6.init段中
那么initcall为什么要分成这么多段呢?
系统的初始化时,所有的东西都必须按照一定的顺序初始化
对于驱动注册,是在上面的initcall6里面实现的。而要实现设备驱动的注册,必须要在设备驱动模型初始化完之后才能进行,否则如果设备驱动的管理程序都还没初始化,则驱动的注册肯定就有问题了。而要想让初始化阶段先初始化驱动的管理程序,如果靠函数依次调用,因为内核的内容太庞大,这明显不可能实现。所以初始化阶段,内核按先后顺序分了16个子阶段阶段
通常越靠前的是越底层越核心的初始化,通常后面的初始化对前面的都有一定的依赖
总结起来就是:
1. __init修饰的函数,表示把该函数放入init.text这个代码段
2. module_init修饰的函数,表示把init.text代码段中的函数地址,存到init.data段
3. 内核启动时,会根据initcall后面的数字大小,分层进行调用初始化
驱动程序中的MODULE_LICENSE("GPL");用于表示许可证,不需要深度了解
现在我们在框架的基础上完成注册字符设备、struct file_operations等操作
二、完成init()函数和exit()函数
... static int g_major; module_param(g_major, int, S_IRUGO); static struct led_device* dev; static struct class* scls; static struct device* sdev; ... static int __init led_init(void) { int ret; dev_t devt; /* 1. 申请设备号 */ if (g_major) { devt = MKDEV(g_major, 0); ret = register_chrdev_region(devt, 1, "led"); } else ret = alloc_chrdev_region(&devt, 0, 1, "led"); if (ret) return ret; /* 2. 申请文件内私有结构体 */ dev = kzalloc(sizeof(struct led_device), GFP_KERNEL); if (dev == NULL) { ret = -ENOMEM; goto fail_malloc; } /* 3. 注册字符设备驱动 */ cdev_init(&dev->cdev, &led_fops); /* 初始化cdev并链接file_operations和cdev */ ret = cdev_add(&dev->cdev, devt, 1); /* 注册cdev */ if (ret) return ret; /* 4. 创建类设备,insmod后会生成/dev/led设备文件 */ scls = class_create(THIS_MODULE, "led"); sdev = device_create(scls, NULL, devt, NULL, "led"); return 0; fail_malloc: unregister_chrdev_region(devt, 1); return ret; } static void __exit led_exit(void) { /* 镜像注销 */ dev_t devt = MKDEV(g_major, 0); device_destroy(scls, devt); class_destroy(scls); cdev_del(&(dev->cdev)); kfree(dev); unregister_chrdev_region(devt, 1); } ...
代码中的module_param(g_major, int, S_IRUGO)表示int型变量g_major可以通过外部向内核传递值
S_IRUGO表示数值的权限为0444
函数原型为:
module_param(name,type,perm);
功能:
用于在加载模块时或者模块加载以后传递参数给模块
参数:
name:模块参数的名称
type:模块参数的数据类型,如bool、charp(字符指针)、short、int、long、ulong(无符号long)
perm:模块参数的访问权限
代码中的dev_t devt定义了设备号,为32位,其中高12位为主设备号,低20位为次设备号
主设备号用来表示一个特定的驱动程序;次设备号用来表示使用该驱动程序的各设备。例如TINY4412,有4个LED,每个LED都可以独立的打开或者关闭。那么,这个LED的字符设备驱动程序,可以将其主设备号注册成5号设备,次设备号分别为1、2、3和4。这里,次设备号就分别对应4个LED
设备文件通常都在/dev目录下:
如上图的/dev/tty,它的主设备号是5,次设备号是0
使用以下宏可以从dev_t中获取主设备号和次设备号:
MAJOR(dev_t dev)
MINOR(dev_t dev)
使用以下宏则可以通过主设备号和次设备号生成dev_t:
MKDEV(int major, int minor)
代码中的register_chrdev_region()和alloc_chrdev_region()用于向系统申请设备号,这两个函数原型为:
int register_chrdev_region(dev_t from, unsigned count, const char *name) int alloc_chrdev_region(dev_t *dev, unsigned baseminor, unsigned count, const char *name)
register_chrdev_region()函数用于已知起始设备的设备号情况,而alloc_chrdev_region()函数用于设备号未知的情况
释放设备号函数原型为:
void unregister_chrdev_region(dev_t from, unsigned count)
kzalloc()用于申请一片内核内存,并清空内存数据,详细了解可查看:Linux驱动函数解读第一节
Linux内核提供了一组函数操作cdev结构体:
cdev_init()用于初始化cdev的成员,并建立cdev和file_operations之间的链接
cdev_alloc()用于动态申请一个cdev内存
cdev_add()函数和cdev_del()函数分别向系统添加和删除一个cdev,完成字符设备的注册和注销
代码中的struct class用于表示一个类,类是一个设备的高层视图,它抽象出了低层的实现细节,大概意思就是抽象出了一个通用的接口,类似于C++的面向对象的编程方式
代码中的struct device用于表示一个设备
我们可以把类当作一个班级,设备当作学生。班级用于容纳学生,当老师来上课时,老师只需要讲一遍,学生就都可以听到(函数抽象)
三、完成write()函数、open()函数和release()函数
static volatile unsigned long *gpm4con; static volatile unsigned long *gpm4dat; /* LED write()函数 */ static ssize_t led_write(struct file *filep, const char __user * buf, size_t len, loff_t *ppos) { struct led_device *dev = filep->private_data; if (copy_from_user(&(dev->stat), buf, 1)) return -EFAULT; if (dev->stat == 1) *gpm4dat &= ~((1 << 3) | (1 << 2) | 1); else *gpm4dat |= ((1 << 3) | (1 << 2) | 1); return 1; } /* LED open()函数 */ static int led_open(struct inode *inodep, struct file *filep) { struct led_device *dev; dev = container_of(inodep->i_cdev, struct led_device, cdev); // 放入私有数据中 filep->private_data = dev; // 映射LED gpm4con = ioremap(0x110002E0, 8); gpm4dat = gpm4con + 1; // 设为输入引脚,灭灯 *gpm4con = 0x1111; *gpm4dat |= ((1 << 3) | (1 << 2) | 1); return 0; } static int led_close(struct inode *inodep, struct file *filep) { iounmap(gpm4con); return 0; } /* 把定义的函数接口集合起来,方便系统调用 */ static const struct file_operations led_fops = {
.owner = THIS_MODULE, .write = led_write, .open = led_open, .release = led_close, };
代码中的write()函数使用了文件私有数据。实际上,大多数Linux驱动遵循一个“潜规则”,那就是将文件的私有数据private_data指向设备结构体,再用read()、write()等函数通过private_data访问设备结构体
需要注意的是,用户空间不能直接访问内核空间的内存,因此在read()函数中一般使用copy_to_user(),在write()函数中一般使用copy_from_user()来完成用户空间和内核空间的数据复制,两函数原型为:
unsigned long copy_from_user(void *to, const void __user *from, unsigned long n) unsigned long copy_to_user(void __user *to, const void *from, unsigned long n)
参数:
to:复制到的地址
from:待复制的地址
n:复制字节数
两函数均不返回被复制的字节数,成功返回0,失败返回负值
container_of()函数可以参考:Linux驱动函数解读第二节
在Linux系统中,开启MMU后,我们就不能直接使用寄存器的硬件地址(或者说我们不知道,寄存器硬件地址被映射到哪块内存了),所以我们只能使用虚拟地址来操纵寄存器。而目前我们不知道虚拟地址,只知道物理地址
所以内核给我们提供了一个接口函数,用来通过寄存器的物理地址得到寄存器的虚拟地址
void __iomem *ioremap(phys_addr_t offset, unsigned long size)
功能:
建立一个新的页表,把输入的物理地址映射到内核空间的一块虚拟地址
参数:
offset:物理地址
size:寄存器大小
对应的释放函数:
void iounmap(void __iomem *addr)
参数:
addr:ioremap()函数返回的虚拟地址
四、完整代码
点击查看:源代码
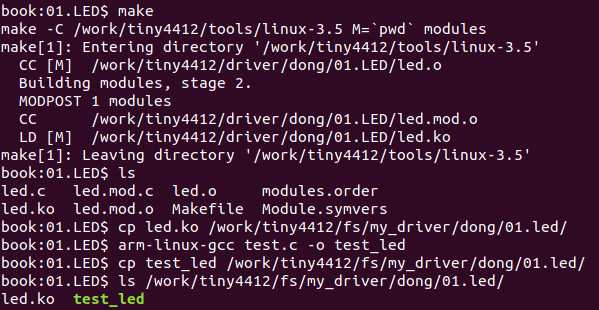
需要注意的是,项目文件夹中led.c配套的Makefile中的KERN_DIR = /work/tiny4412/tools/linux-3.5要改成自己的linux内核路径。
之后执行make命令,把.ko驱动程序和测试程序复制到文件系统中,完成后如下图:
然后启动开发板,执行:
[root @ lioker / ] #cd /my_driver/dong/01.led/
挂载模块insmod:
[root @ lioker 01.led ] #insmod led.ko
[root @ lioker 01.led ] #./test_led on
[root @ lioker 01.led ] #./test_led off
卸载模块rmmod:
[root @ lioker 01.led ] #rmmod led.ko
可看到对应现象
下一章 三、中断分析以及按键中断
原文:https://www.cnblogs.com/Lioker/p/10832919.html