4. 主题报告
4.1 无人驾驶的环境感知与理解 (jian yang, NJUST)
outline
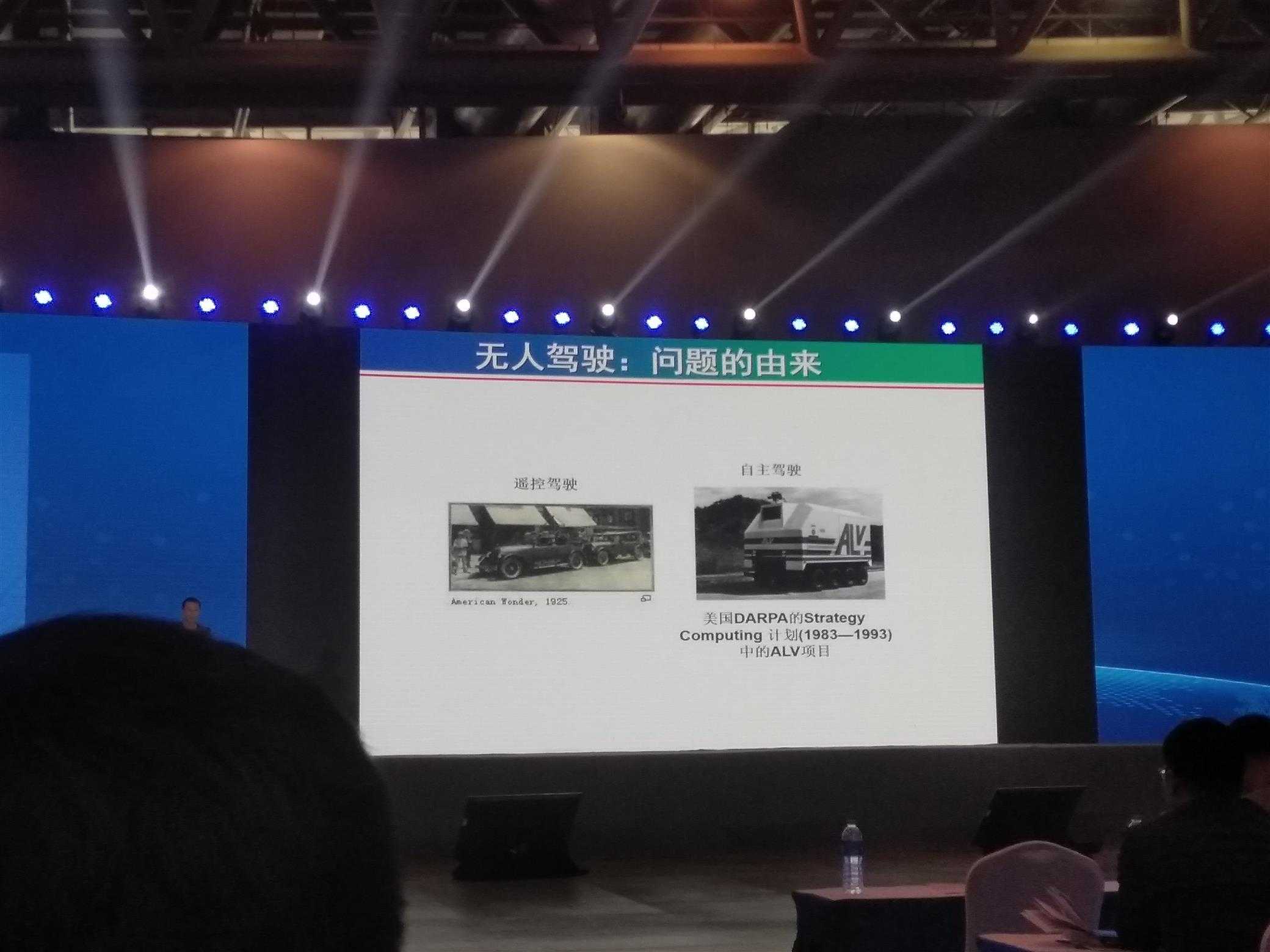
- 无人驾驶发展简介
- 行车环境视觉感知与理解 (具体介绍贴图片)
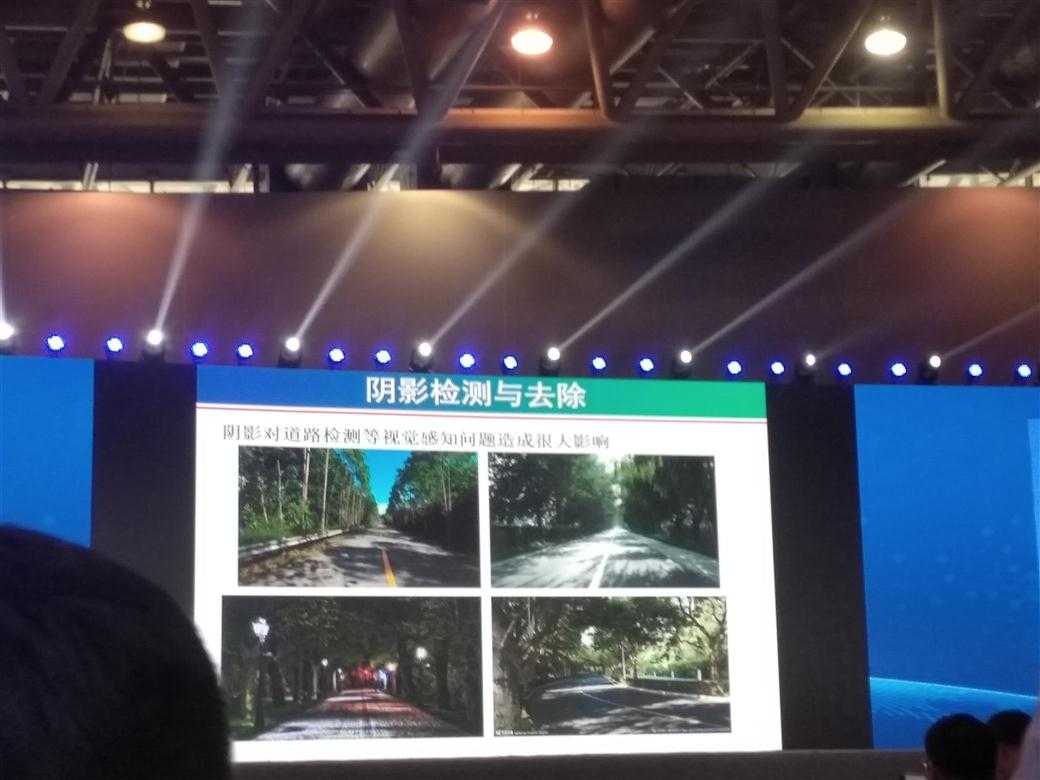
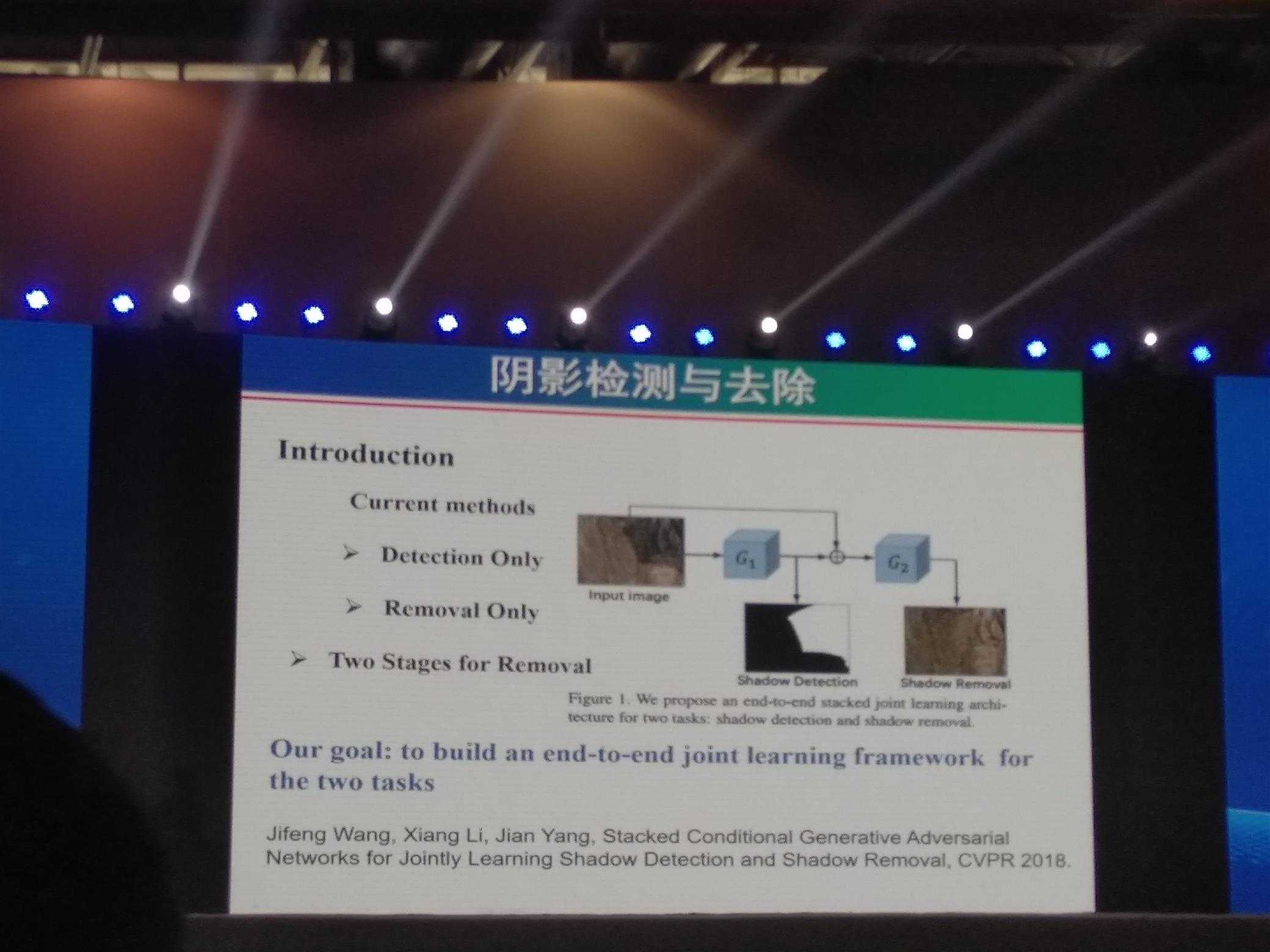
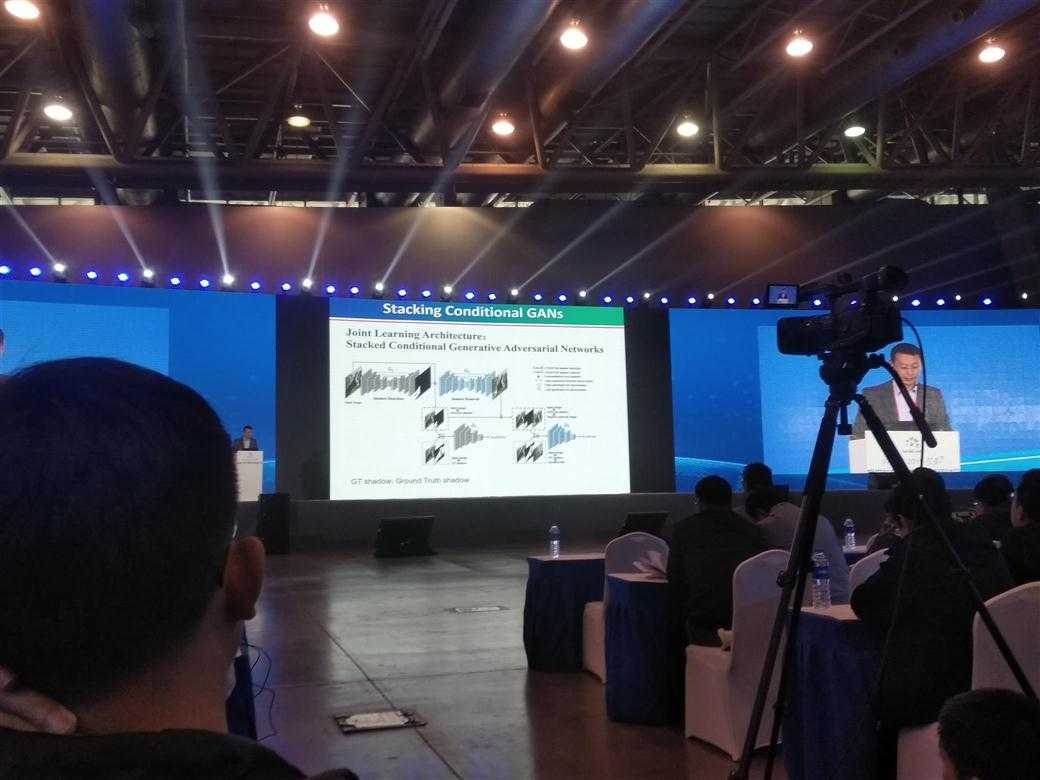
- 阴影检测与去除
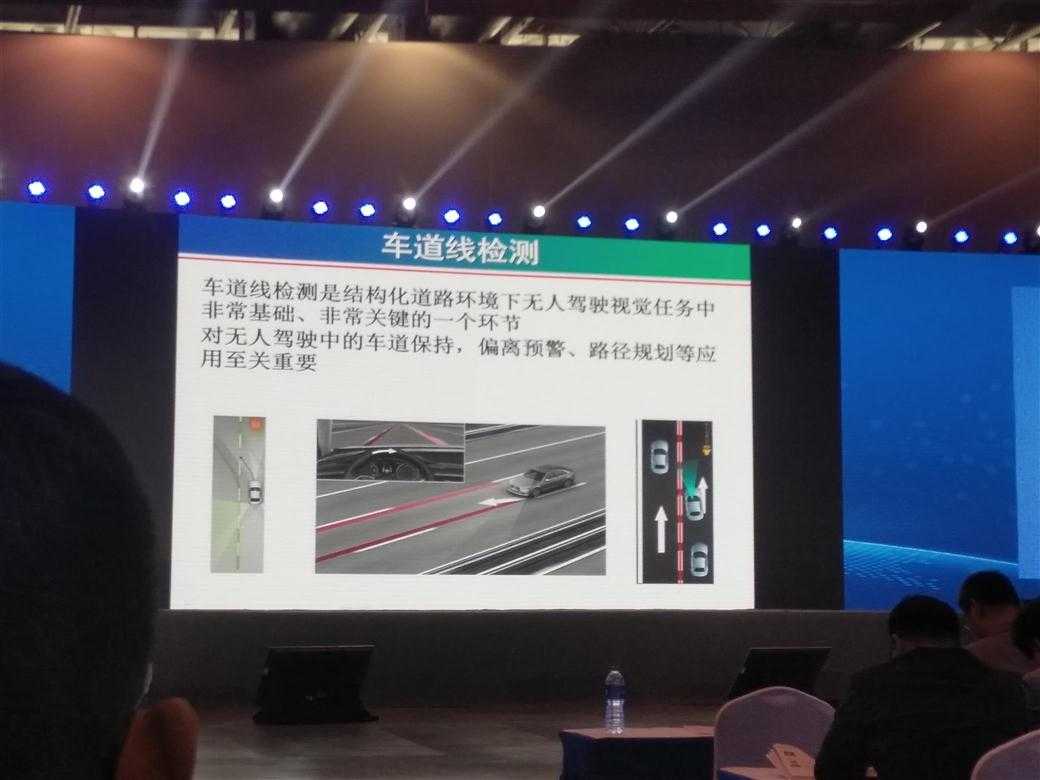
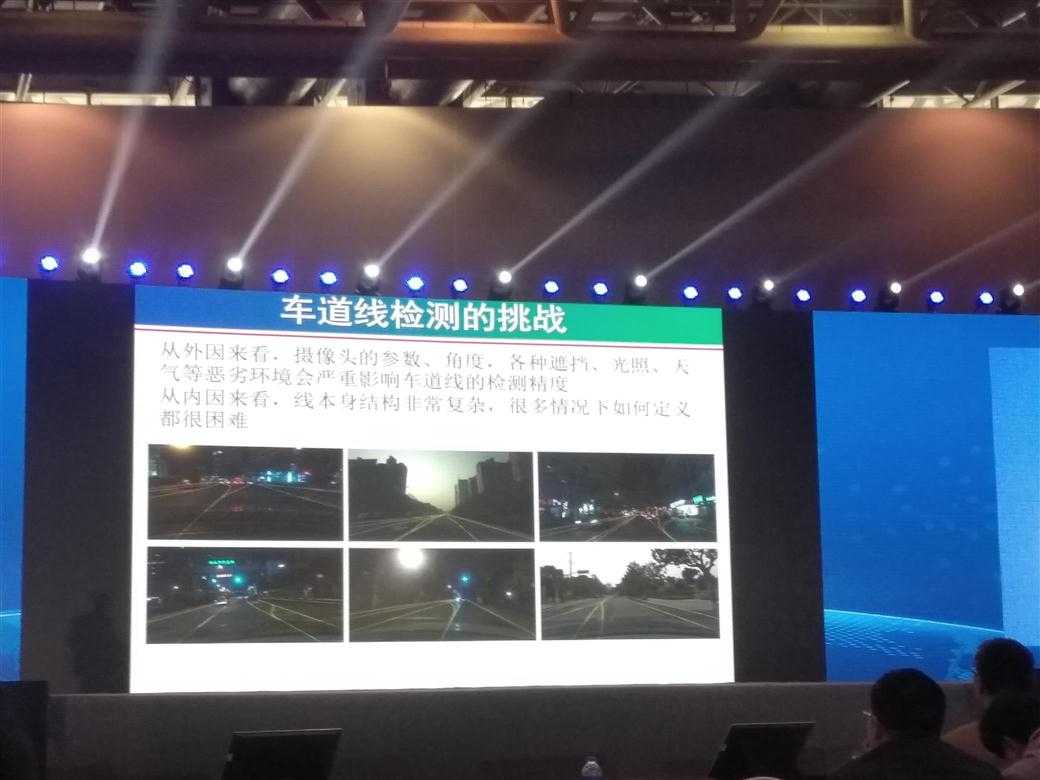
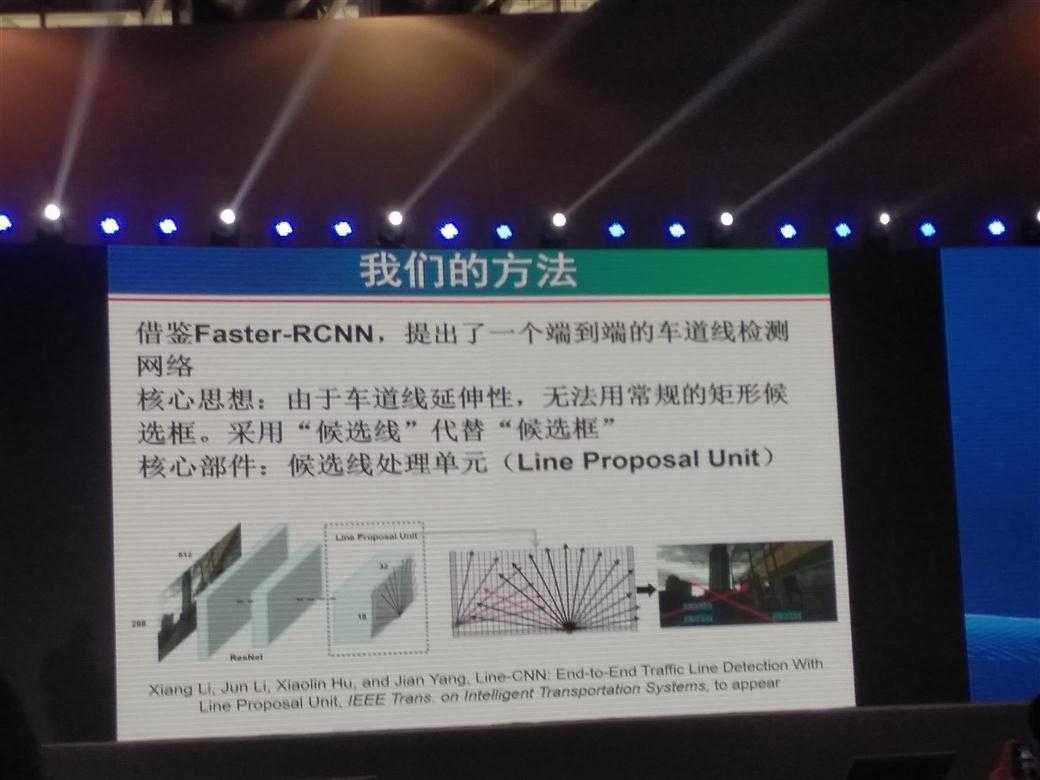
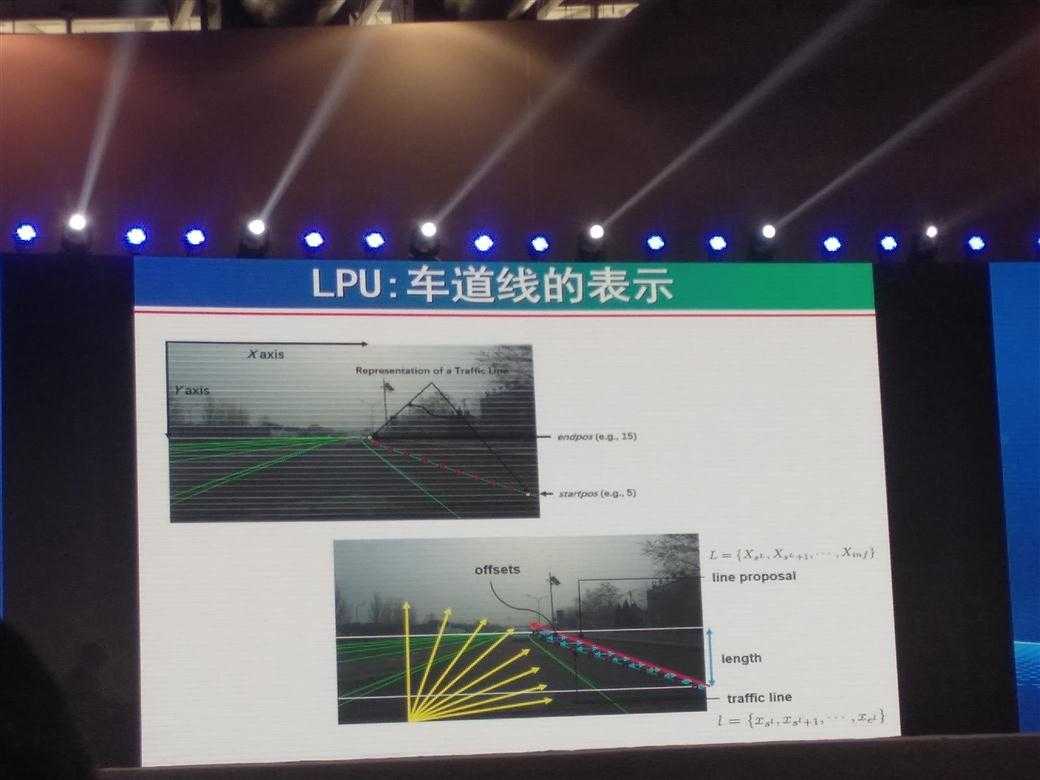
- 车道线检测
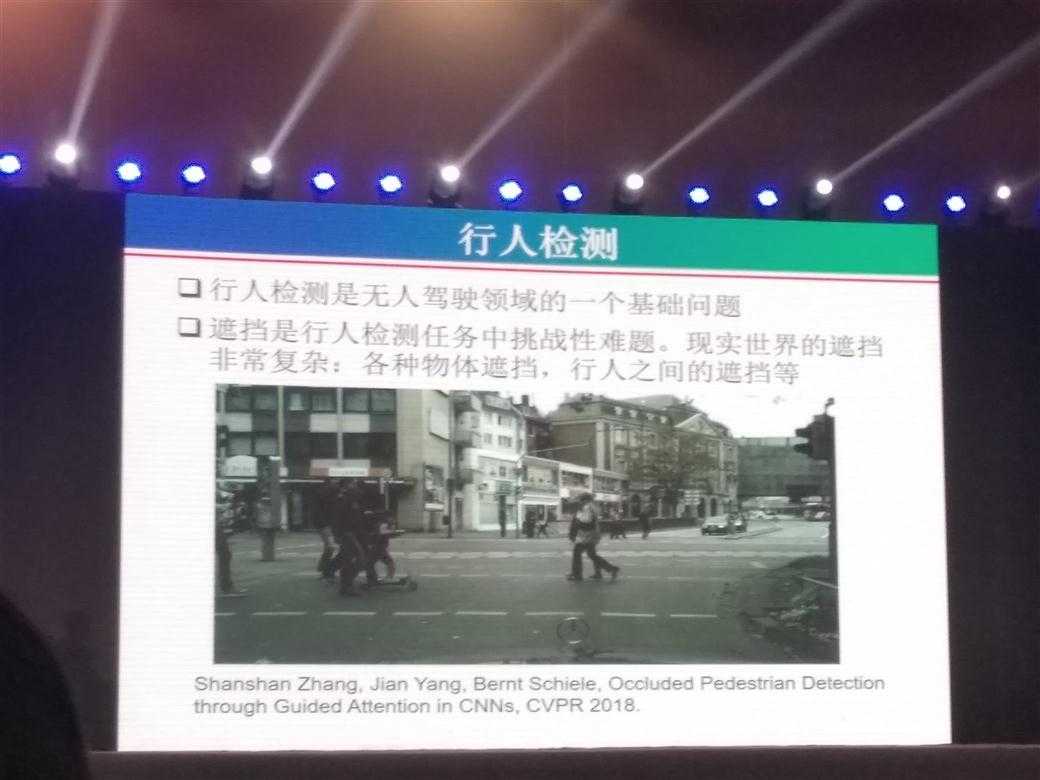
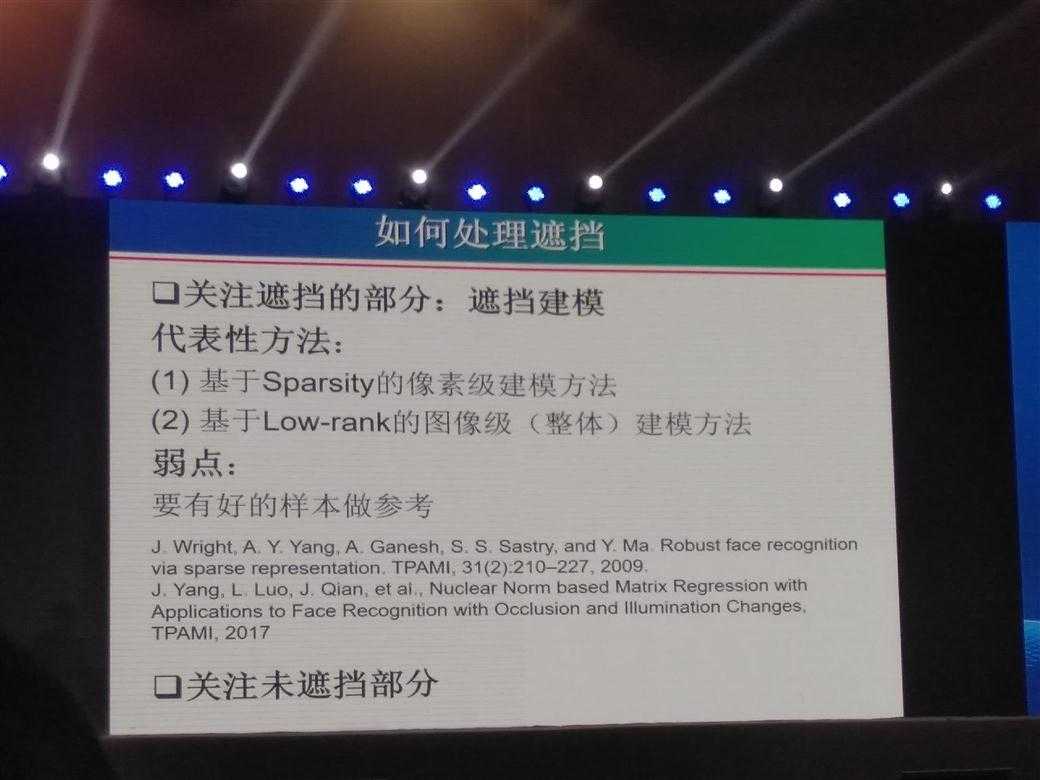
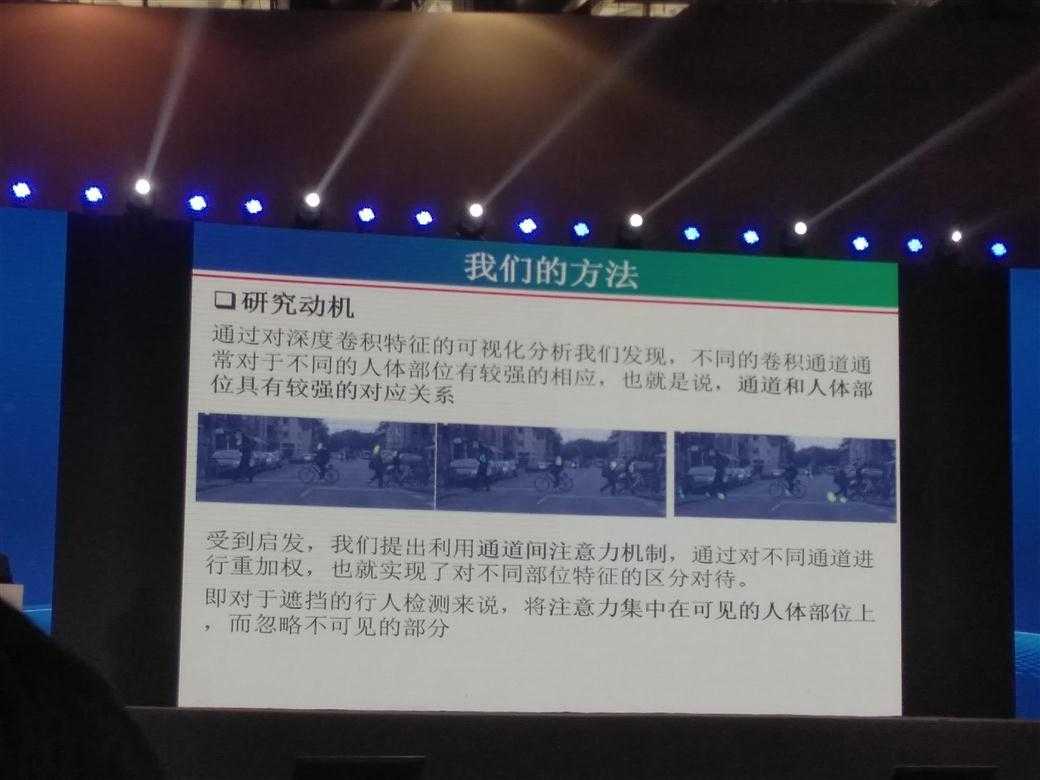
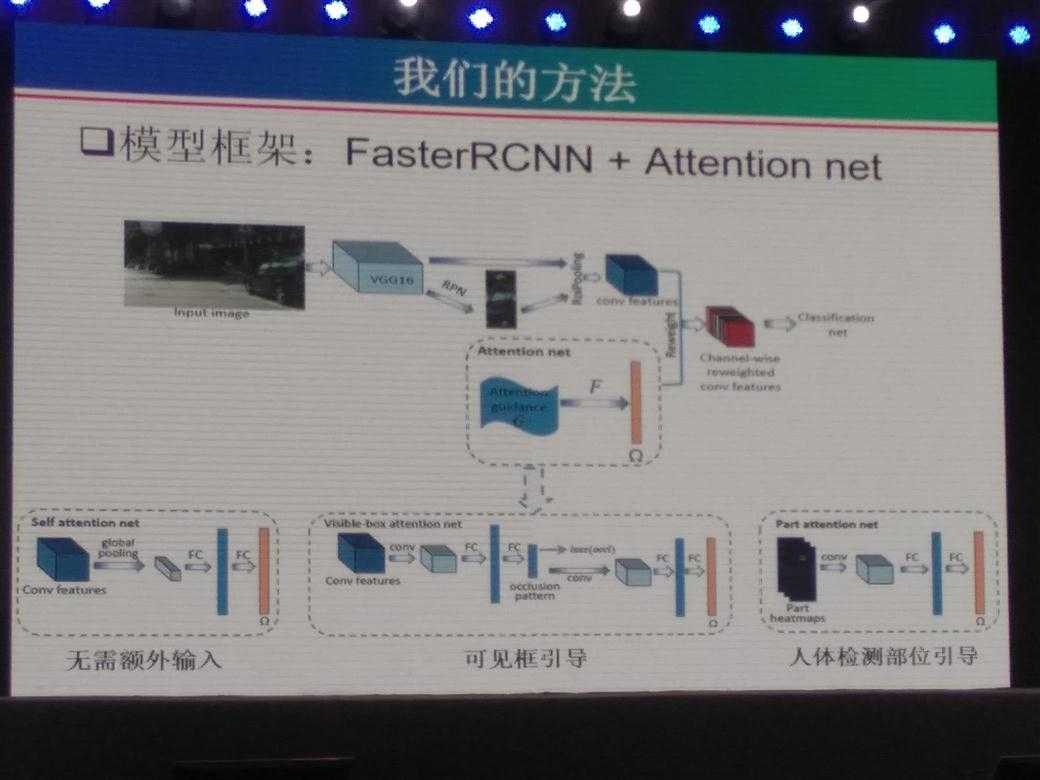
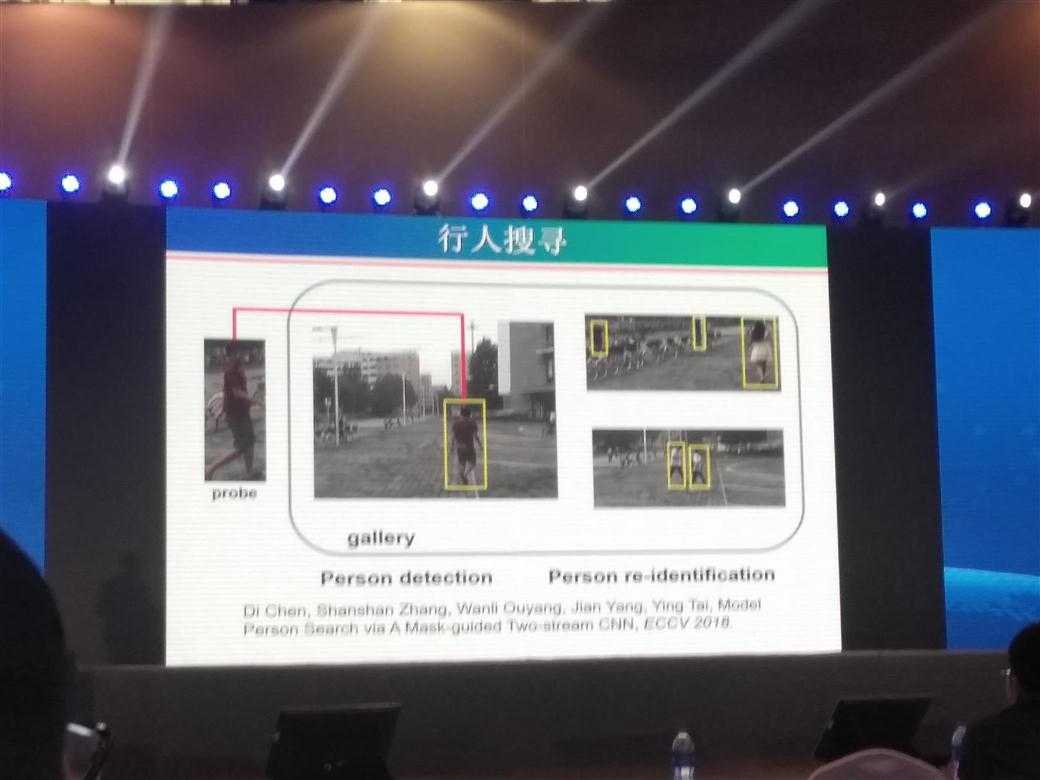
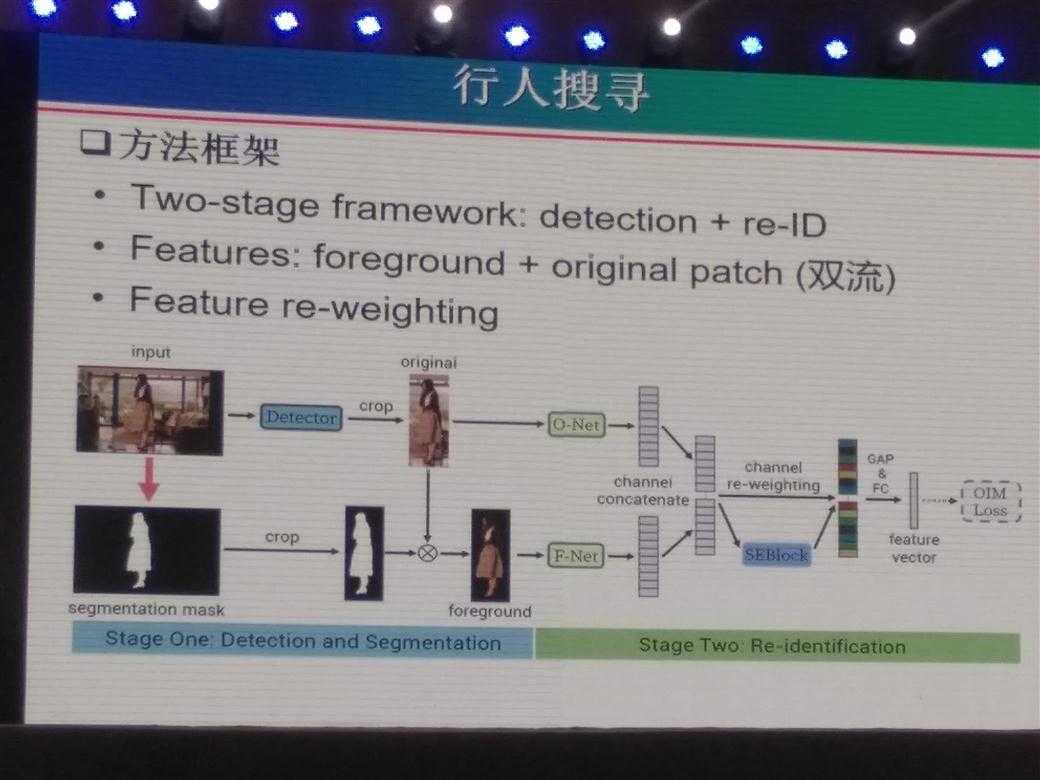
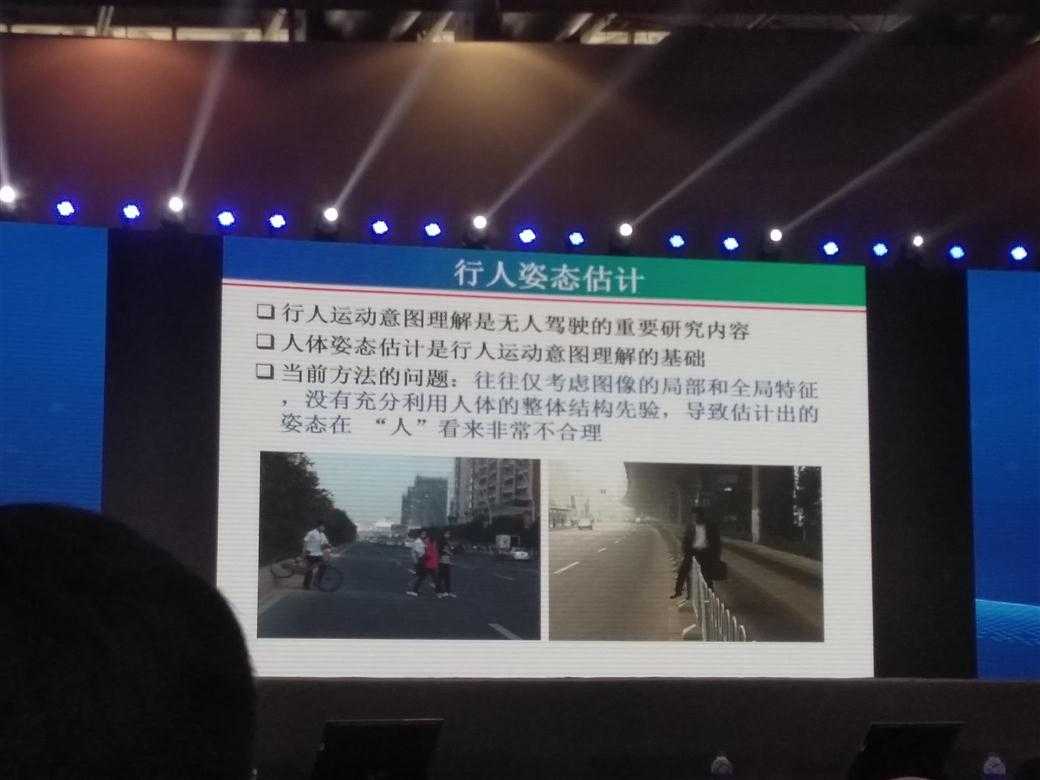
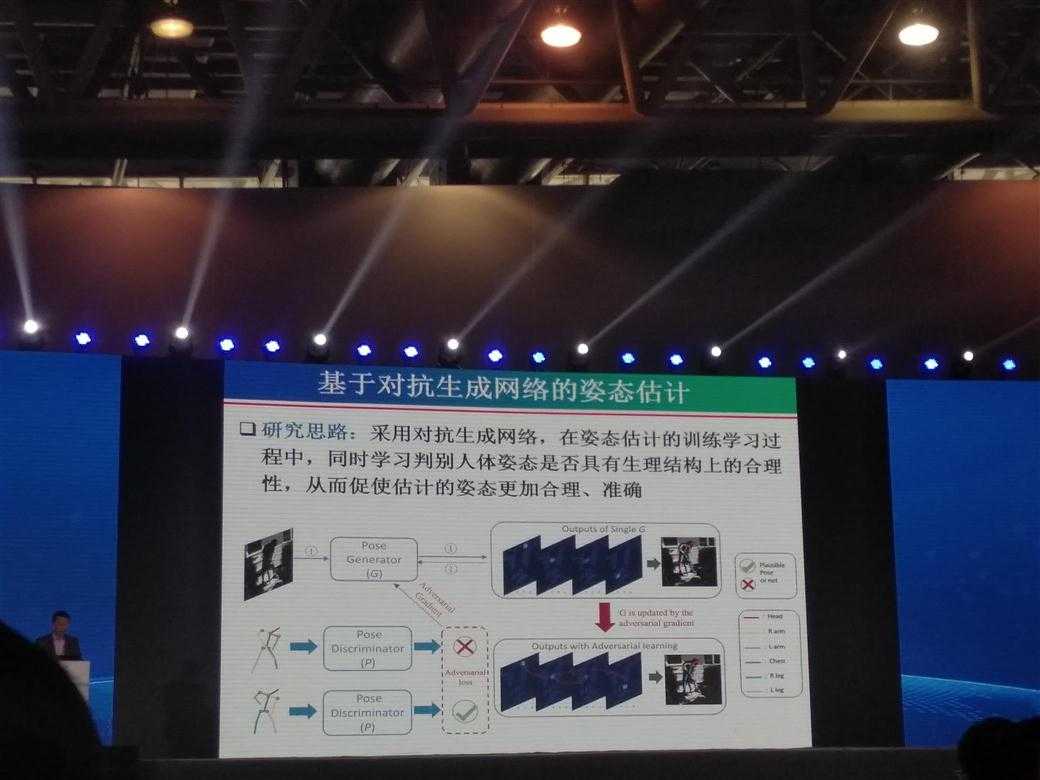
- 行人检测与姿态估计
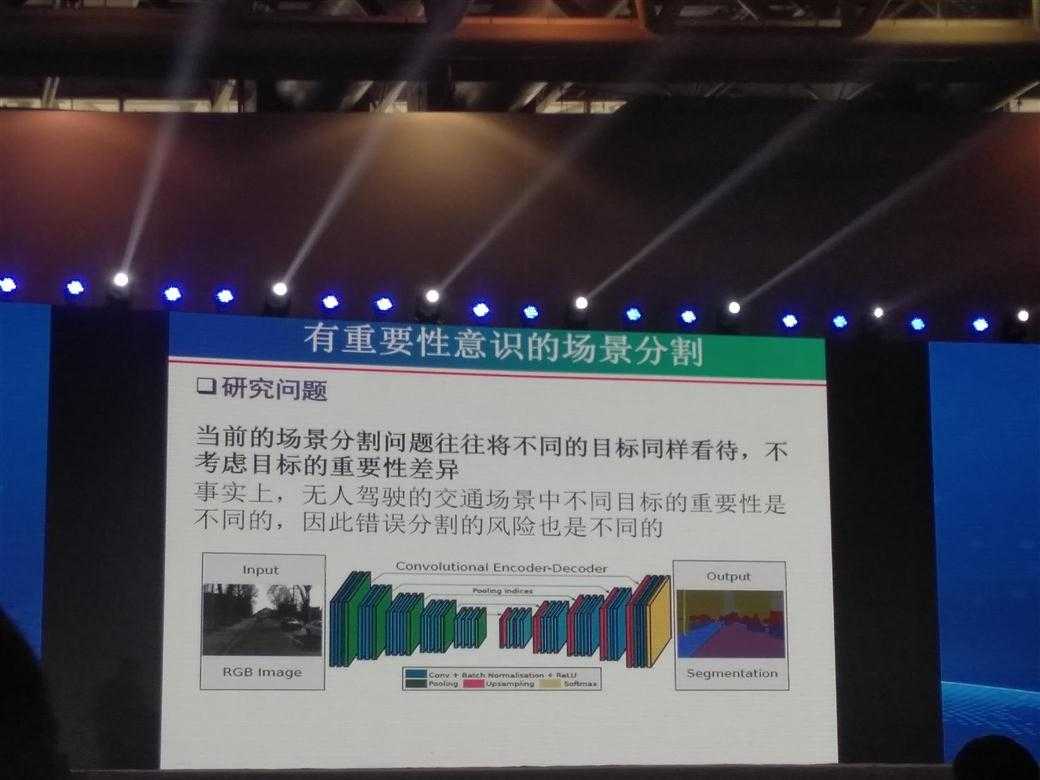
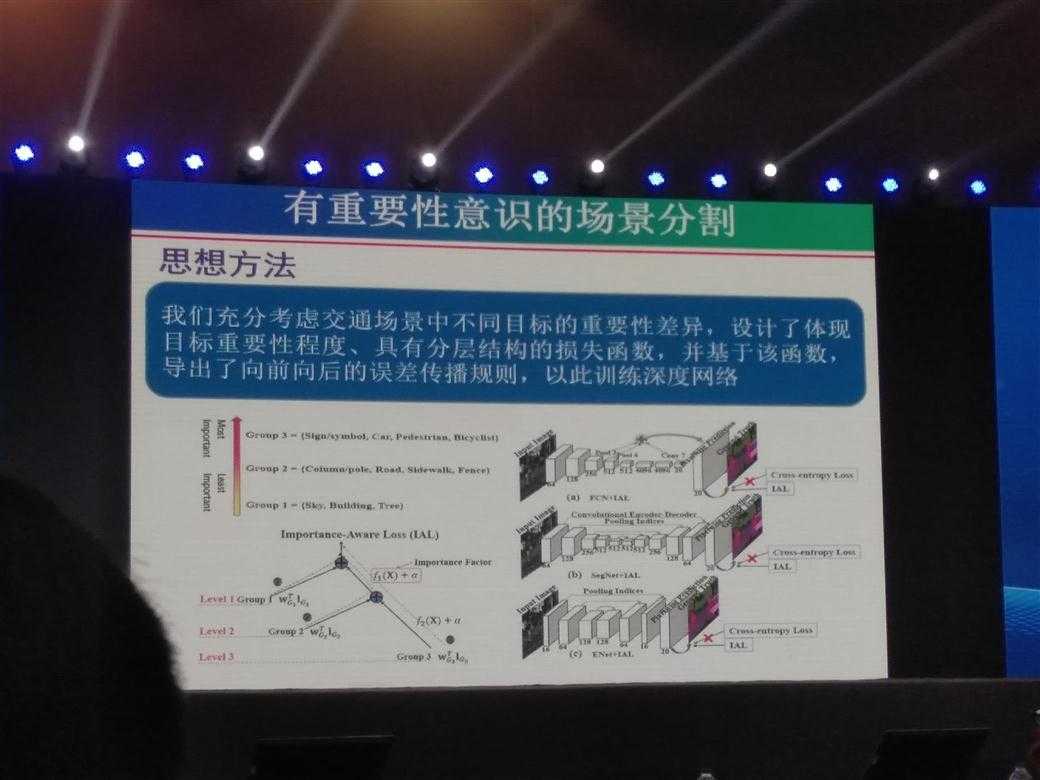
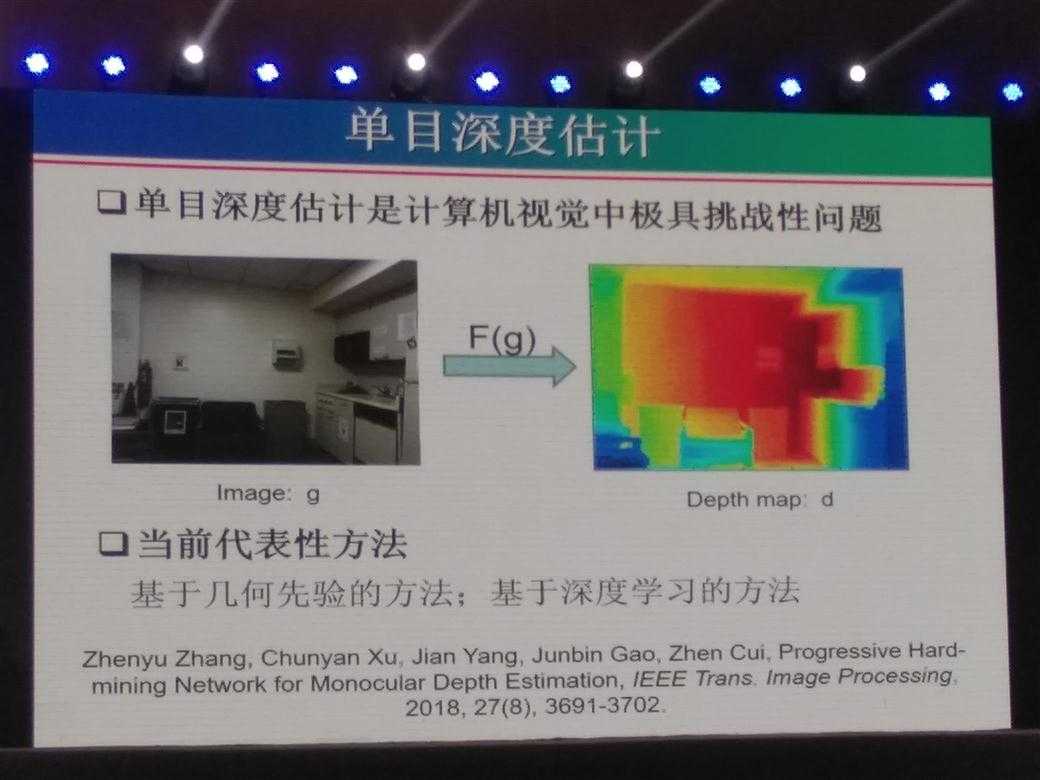
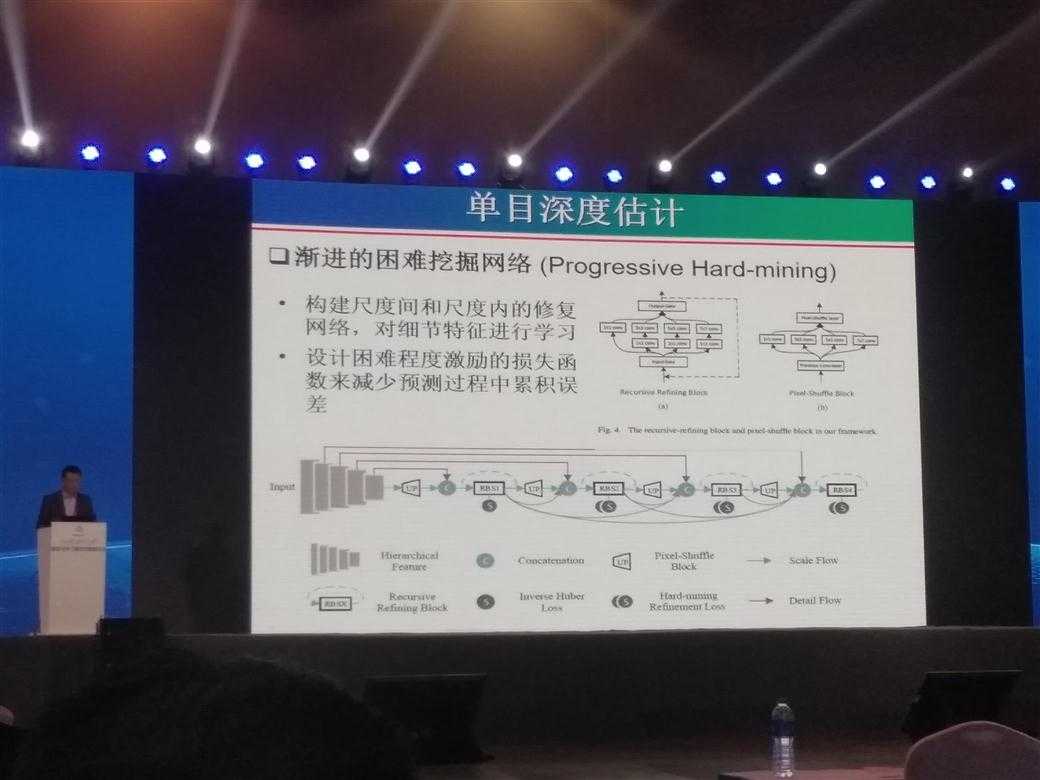
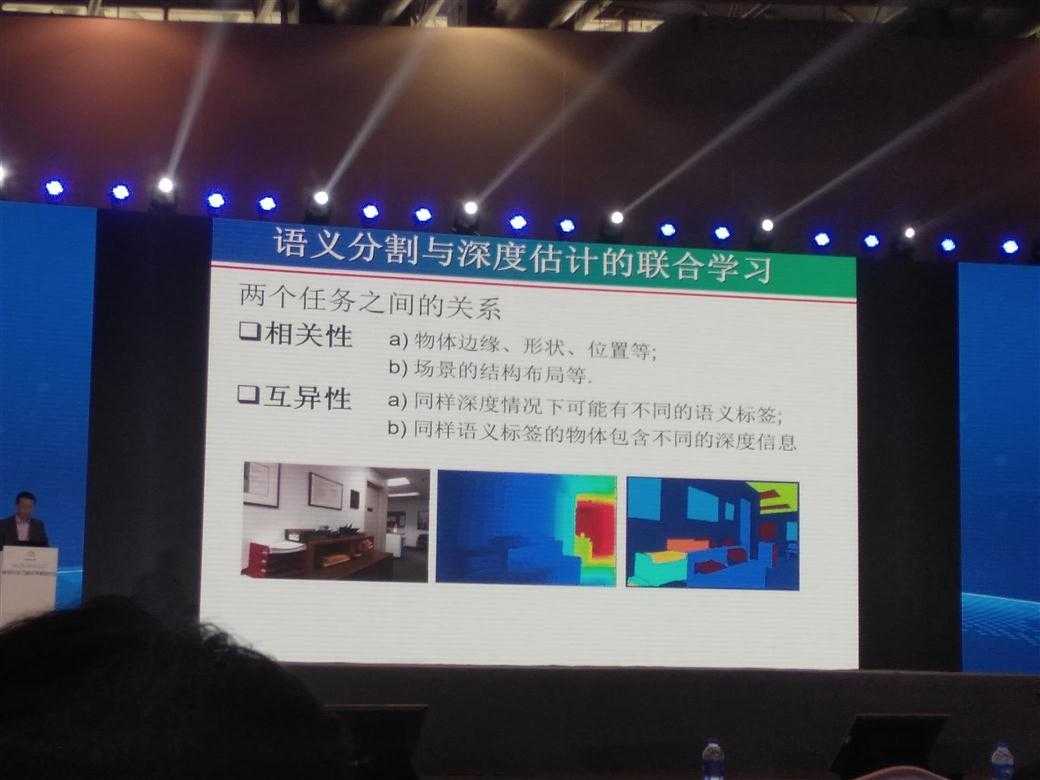
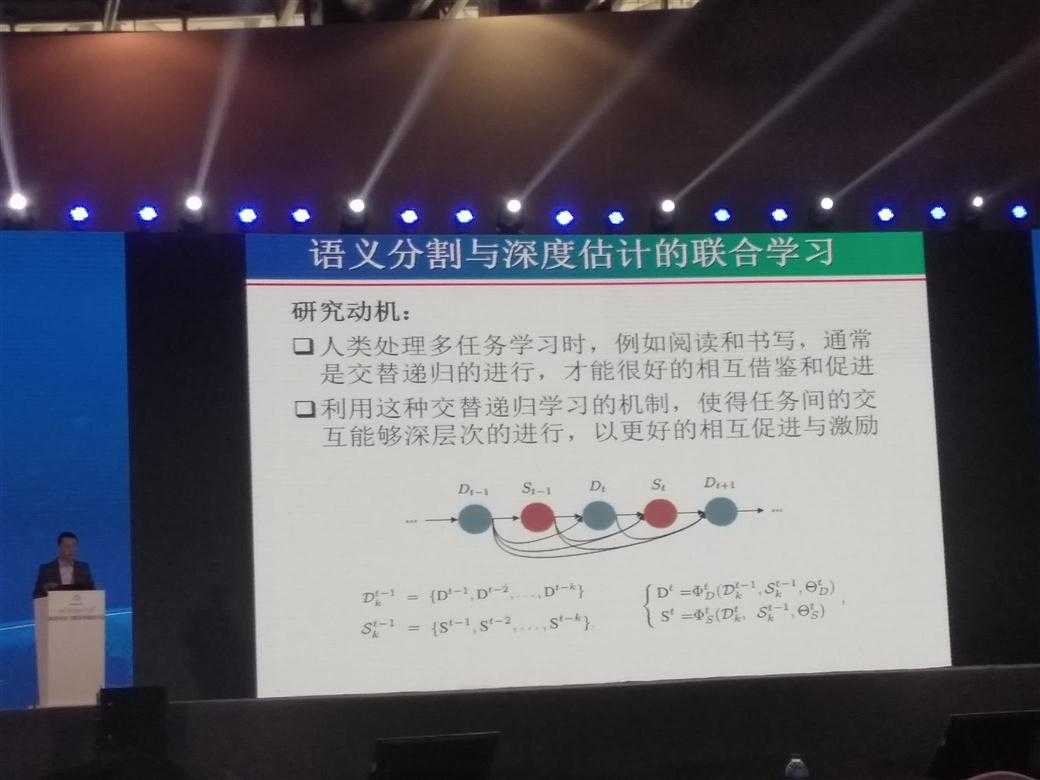
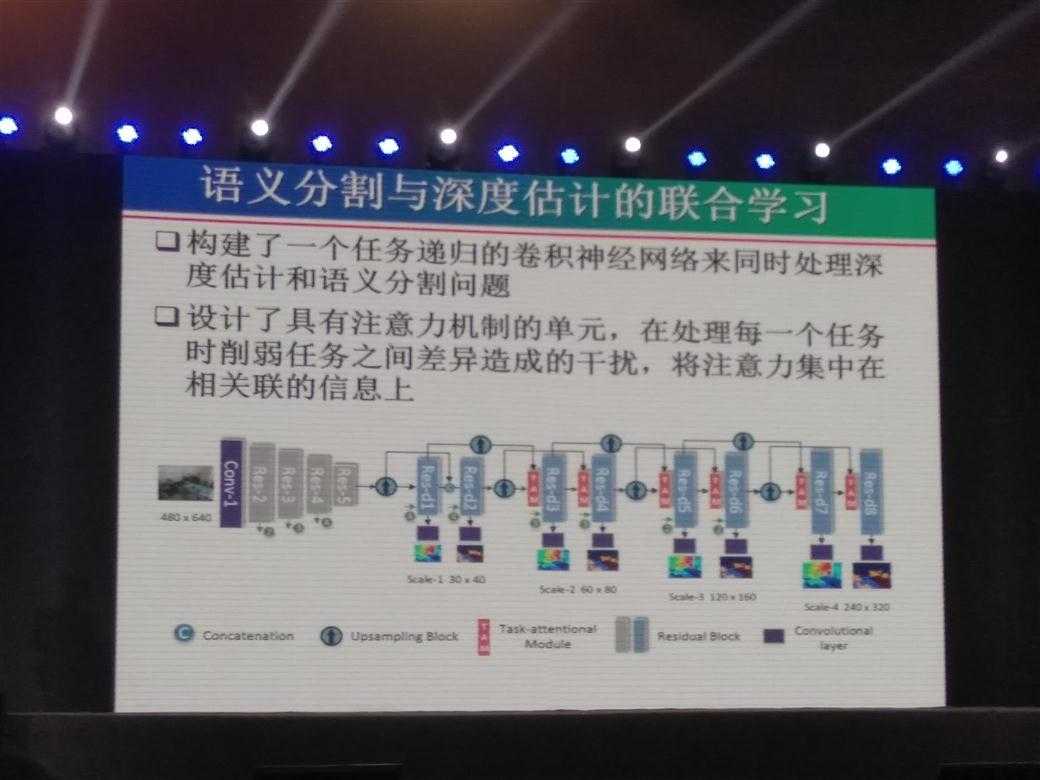
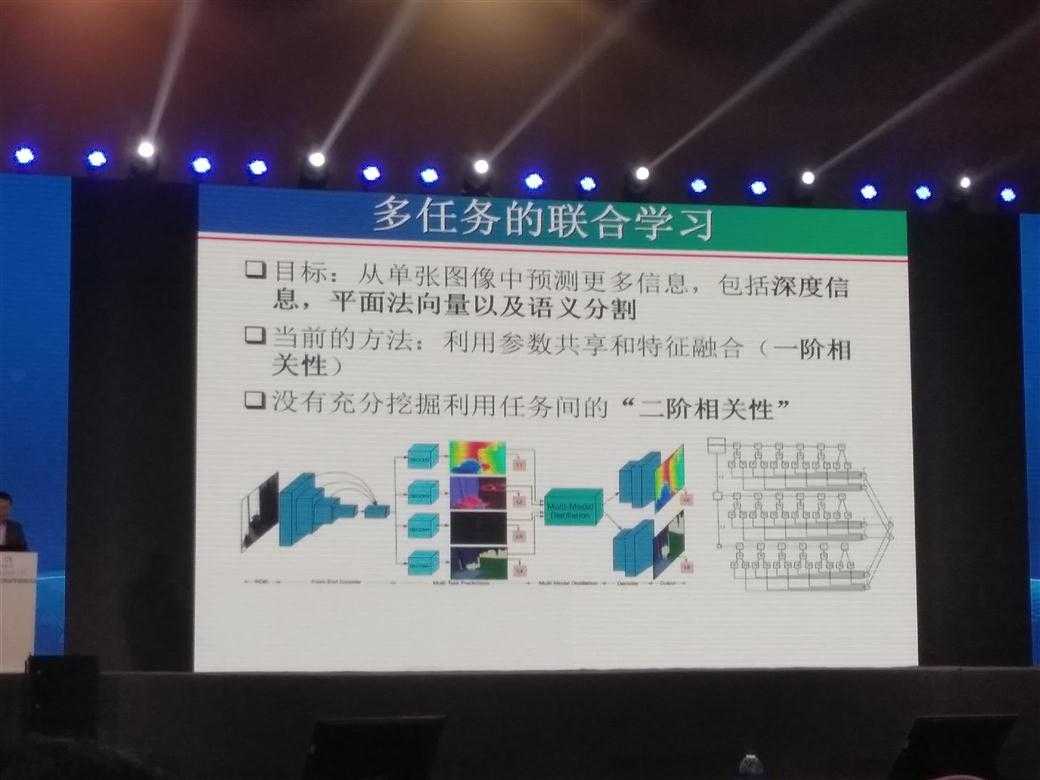
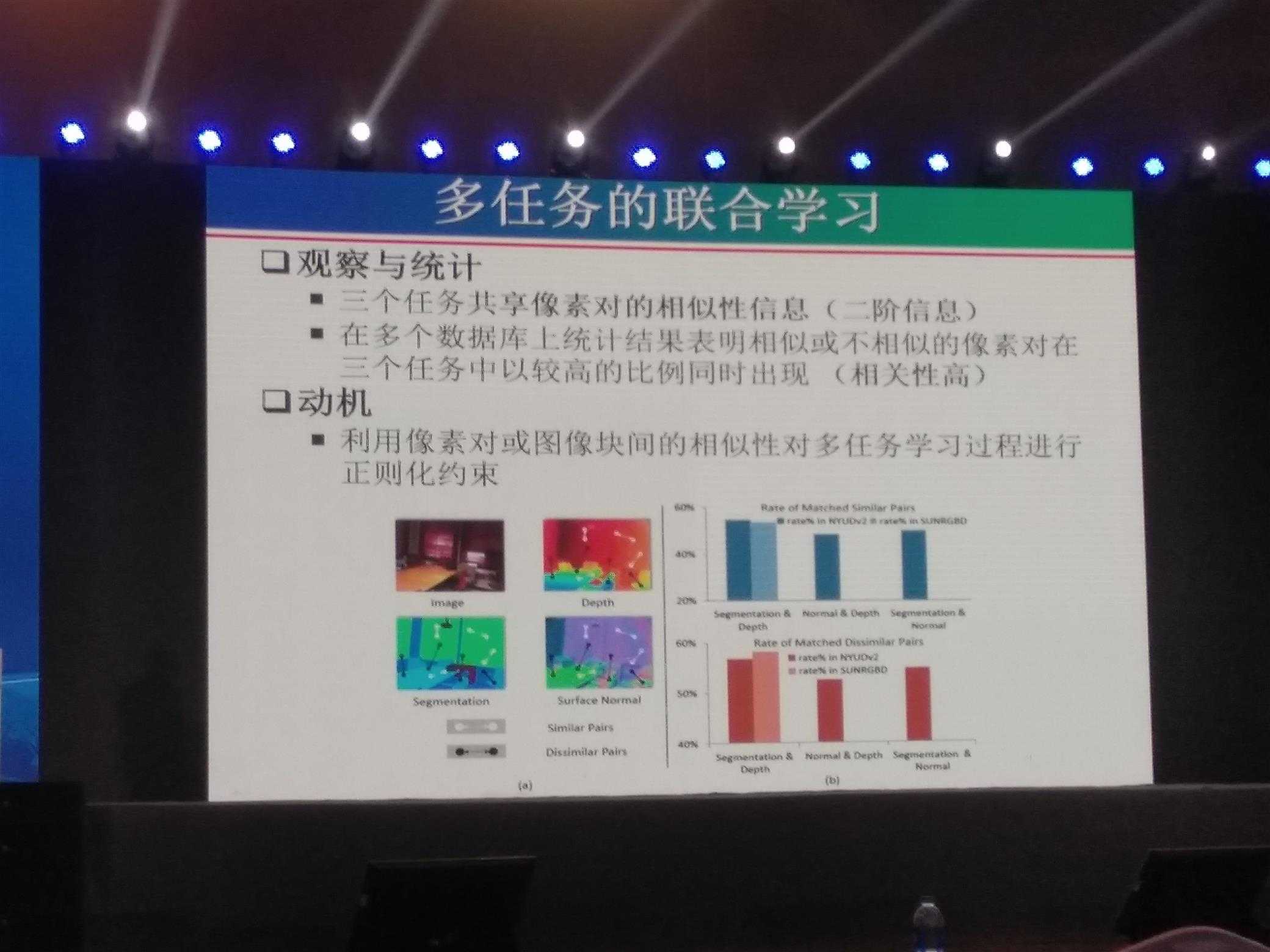
- 场景分割与深度估计
具体,如图


https://blog.csdn.net/qq_15698613/article/details/89303060
4.2:Learning to track and segment objects in videos
4.3 AI破晓——机遇与挑战 (陶大程)
4.4 深度学习处理器 (陈云ji)
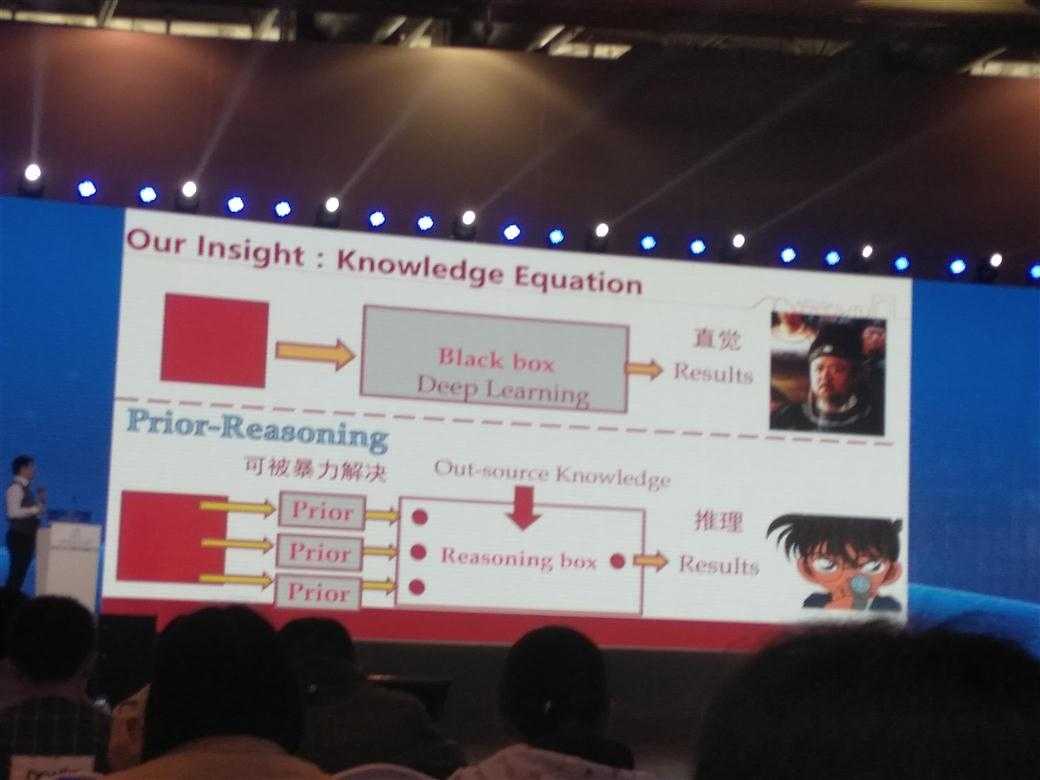
4.5 基于知识驱动的行为理解
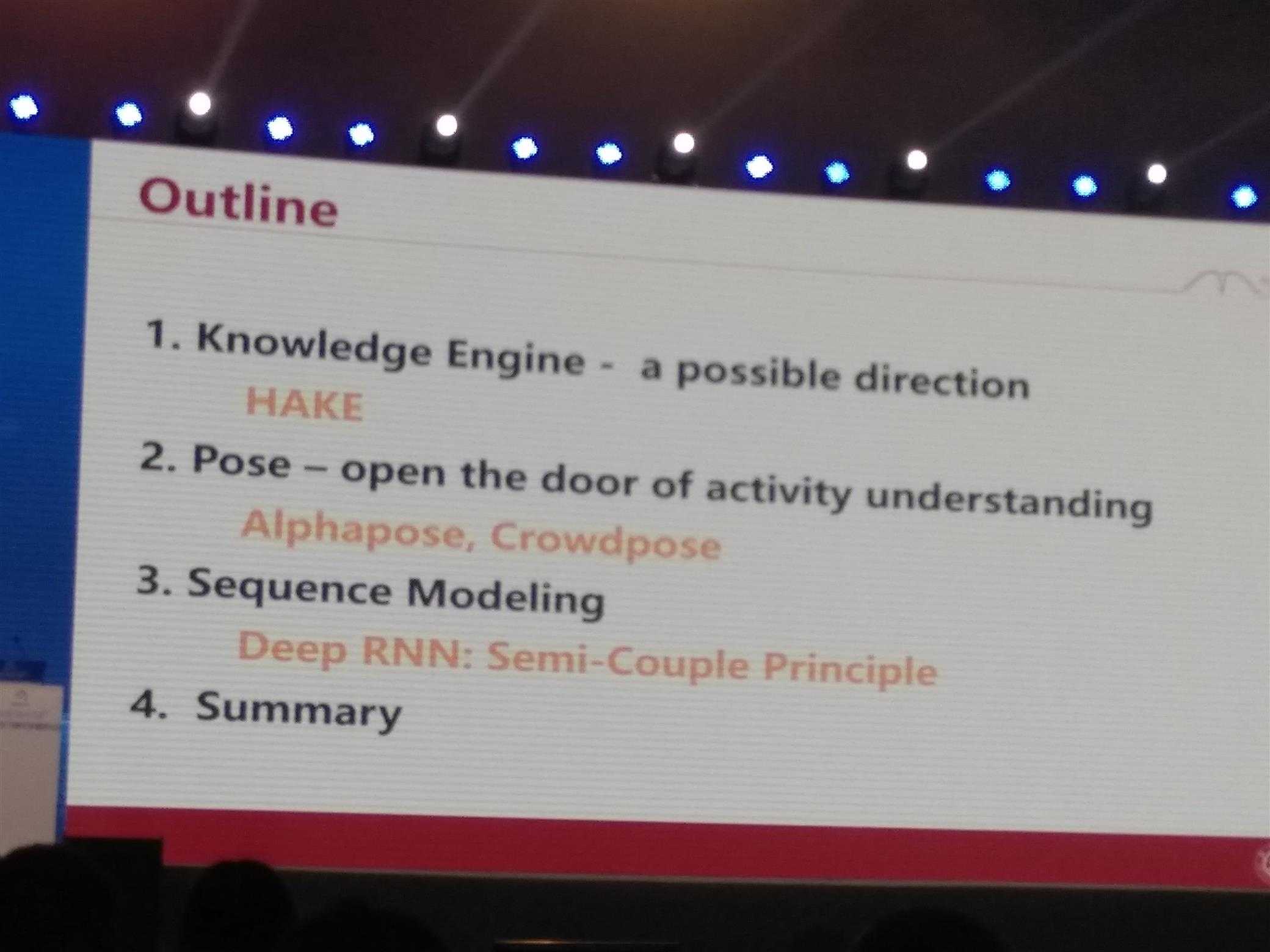
outline
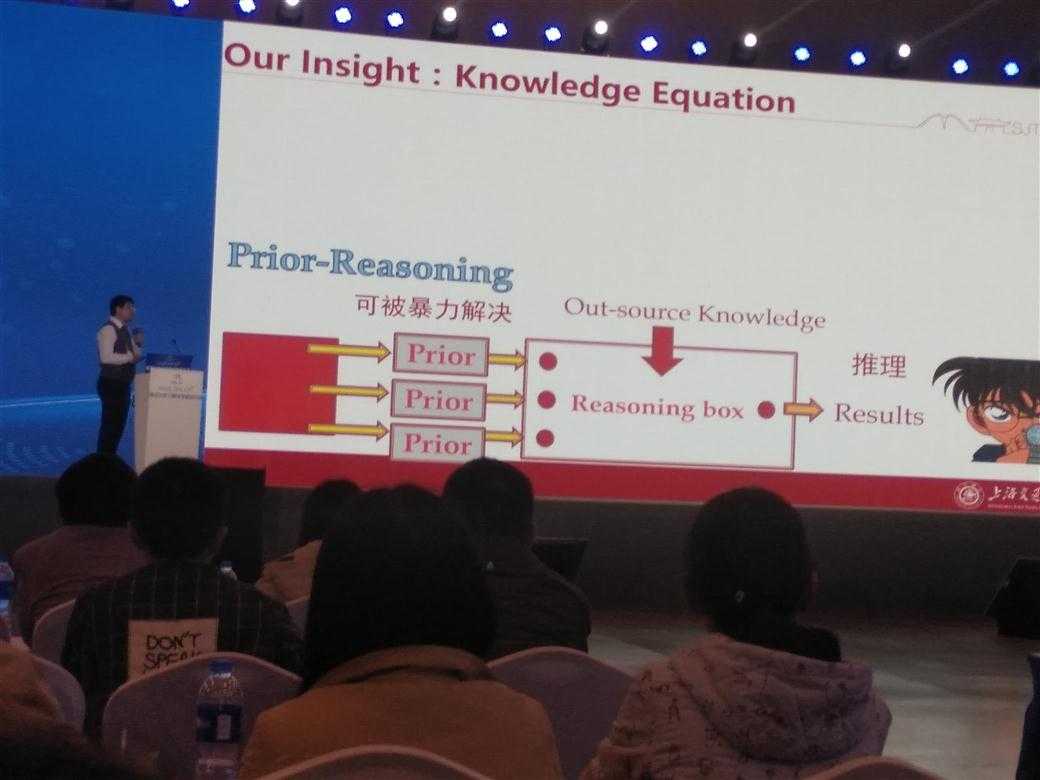
- knowledge engine - a possible direction: HAKE
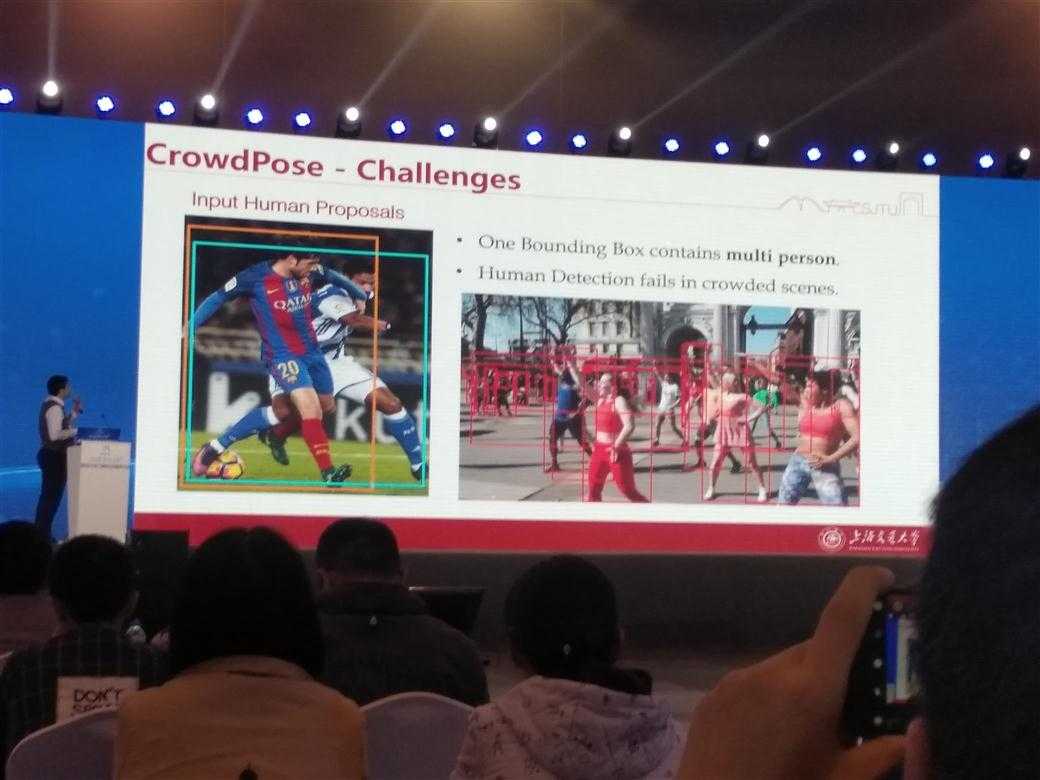
- pose - open the door of activity understanding: Alphapose, Crowdpose
- sequence modeling: Deep RNN: semi-couple prociple
- summary
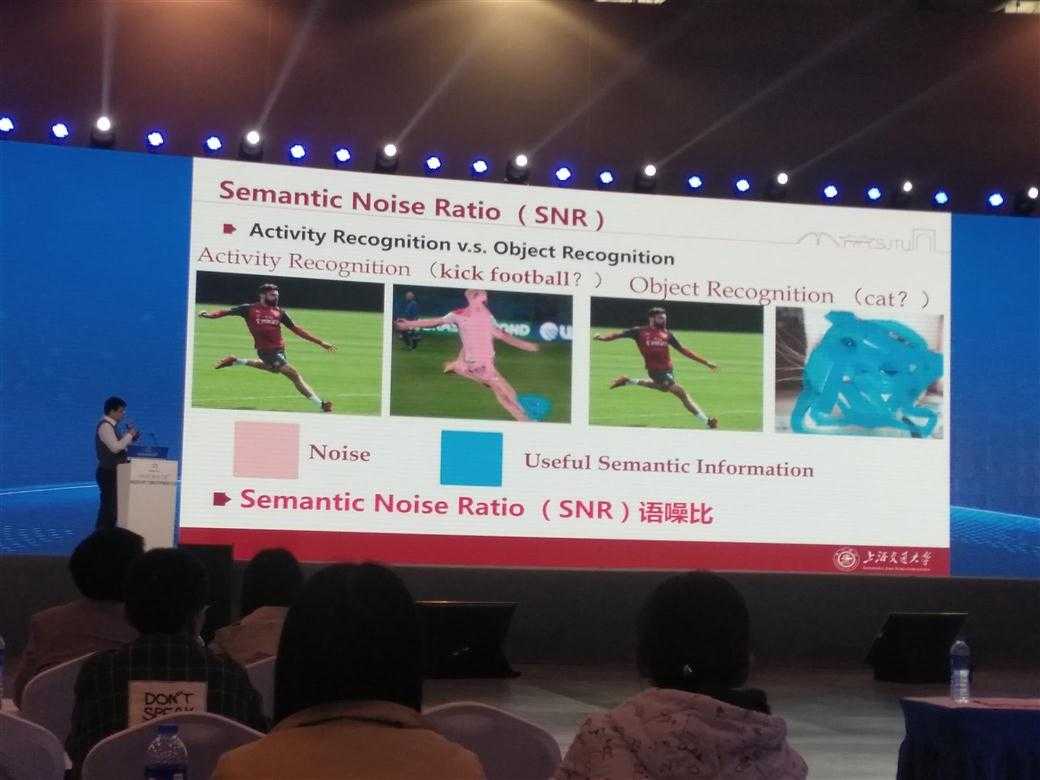
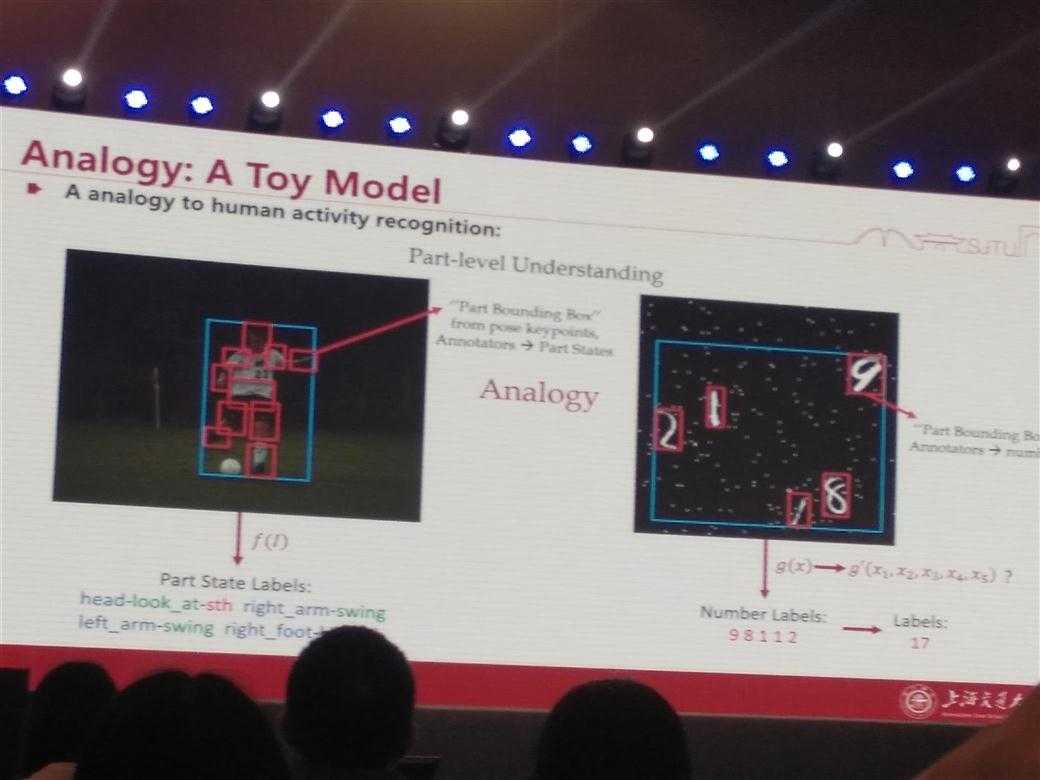
why activity understanding is difficult ?
- huge semantic Noise (compare to object recognition)
- Long-tail distribution, few-shot problem (DL fails)
- 结论:pose is not enough, we need konwledge pose
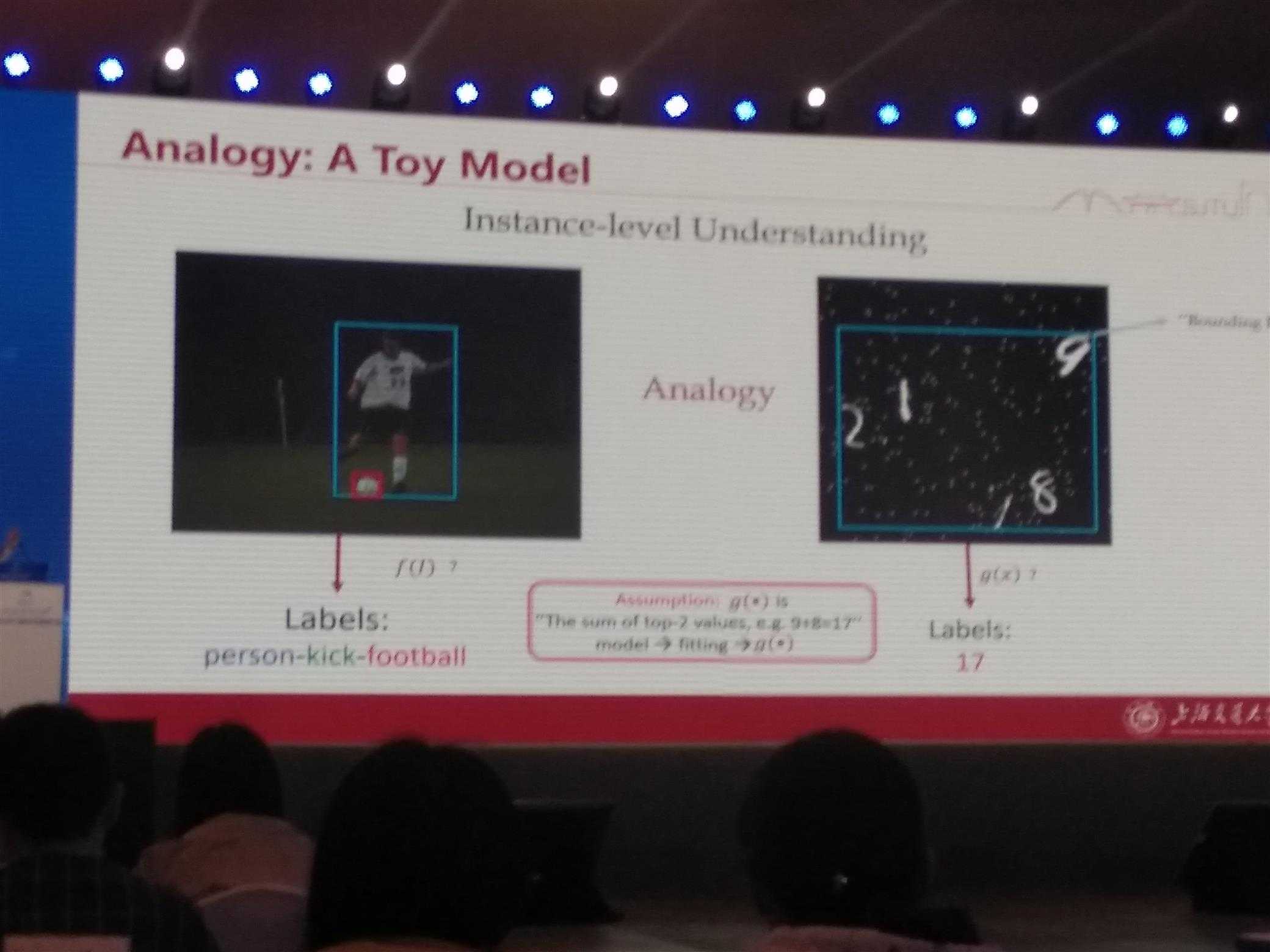
Human activity konwledge engine (HAKE)
- to see/parse/understand the activity
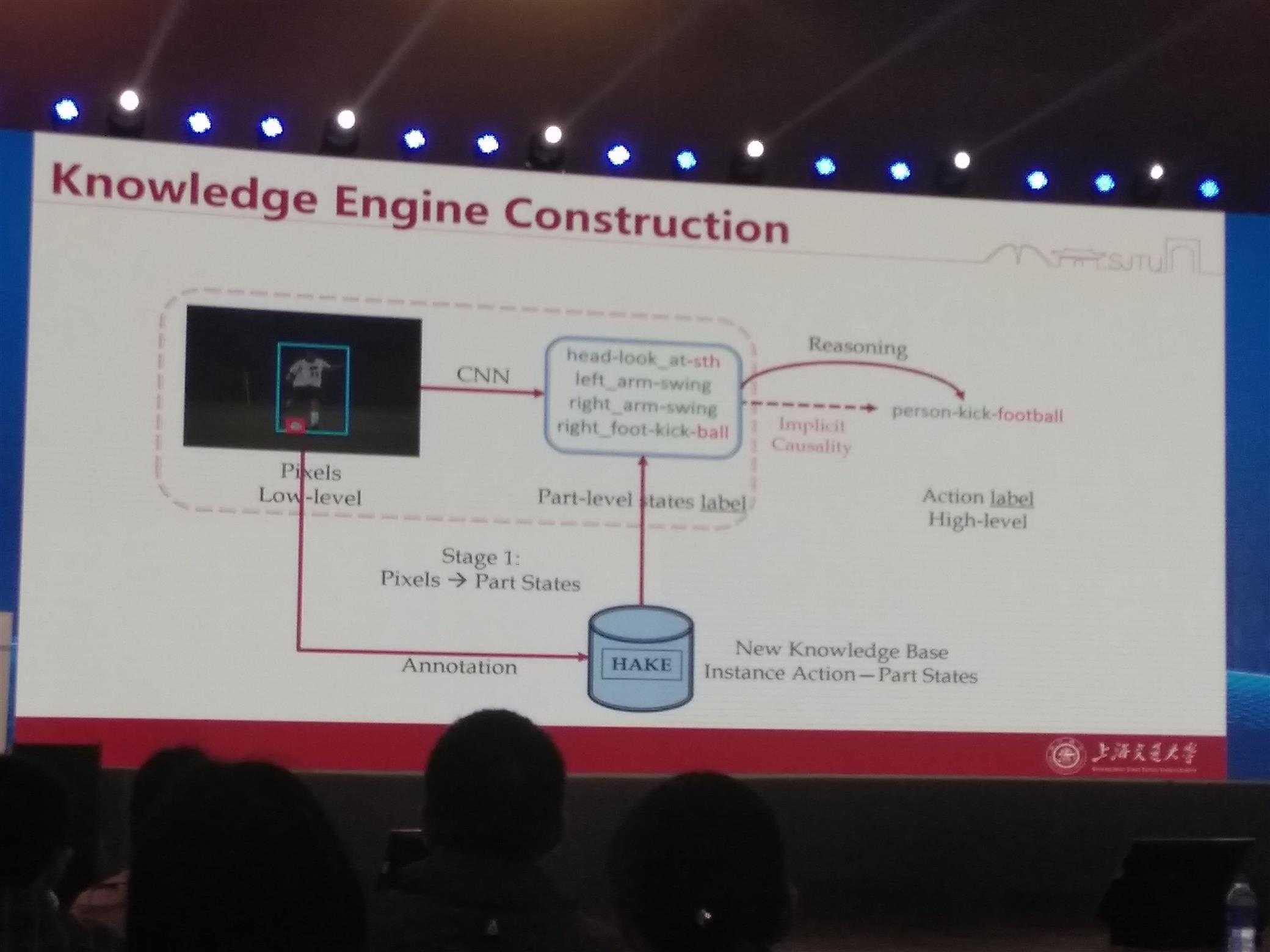
- knowledge engine construction: 见图片
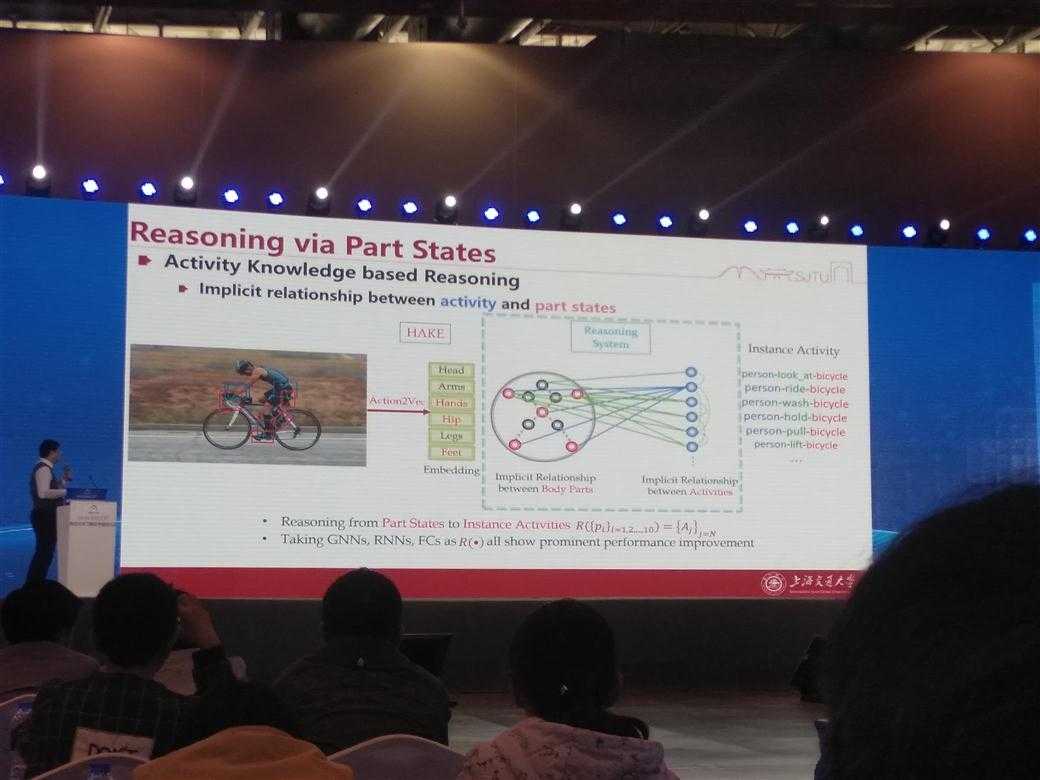
- reasoning via part states(HAKE): 见图片
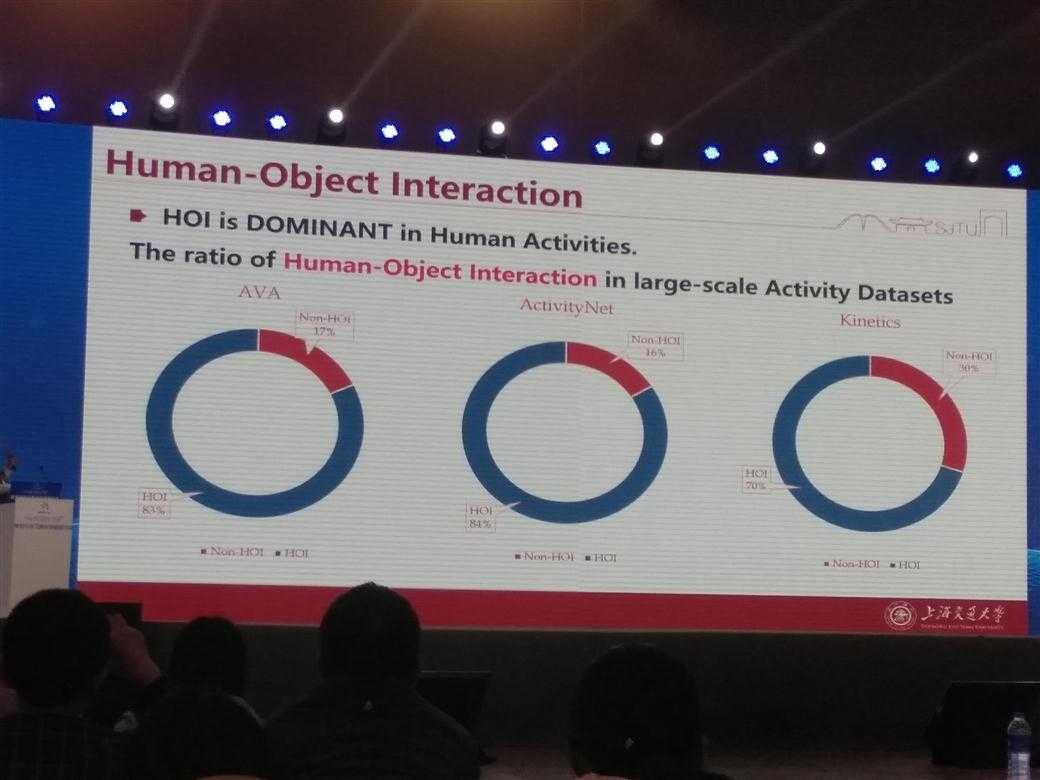
- human-object interaction
- 见图片,几个 HOI Dataset 有:AVA, ActivityNet, Kinetics
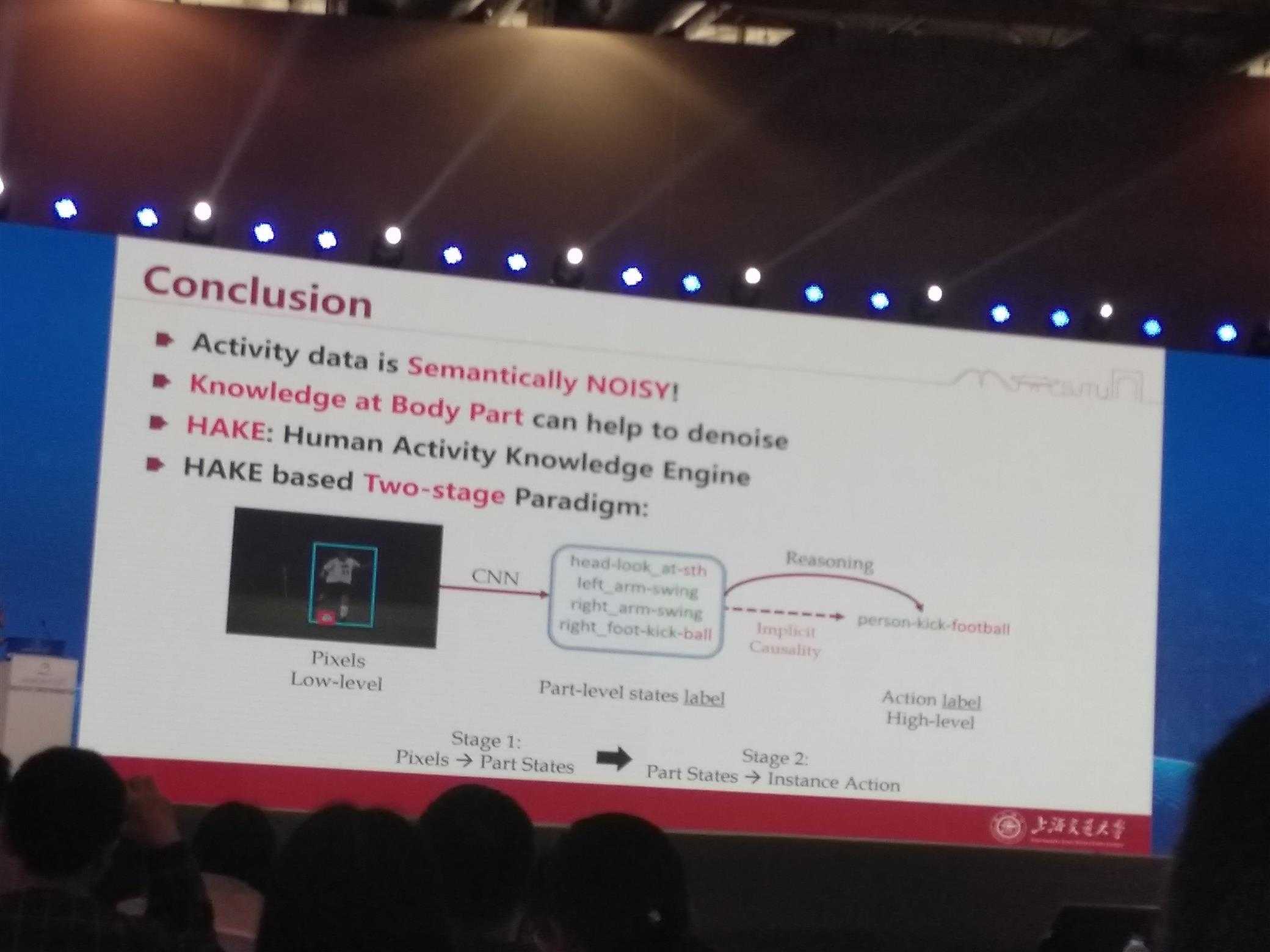
- conclusion:
- activity data is semantically noisy
- knowledge at body part can help to denote
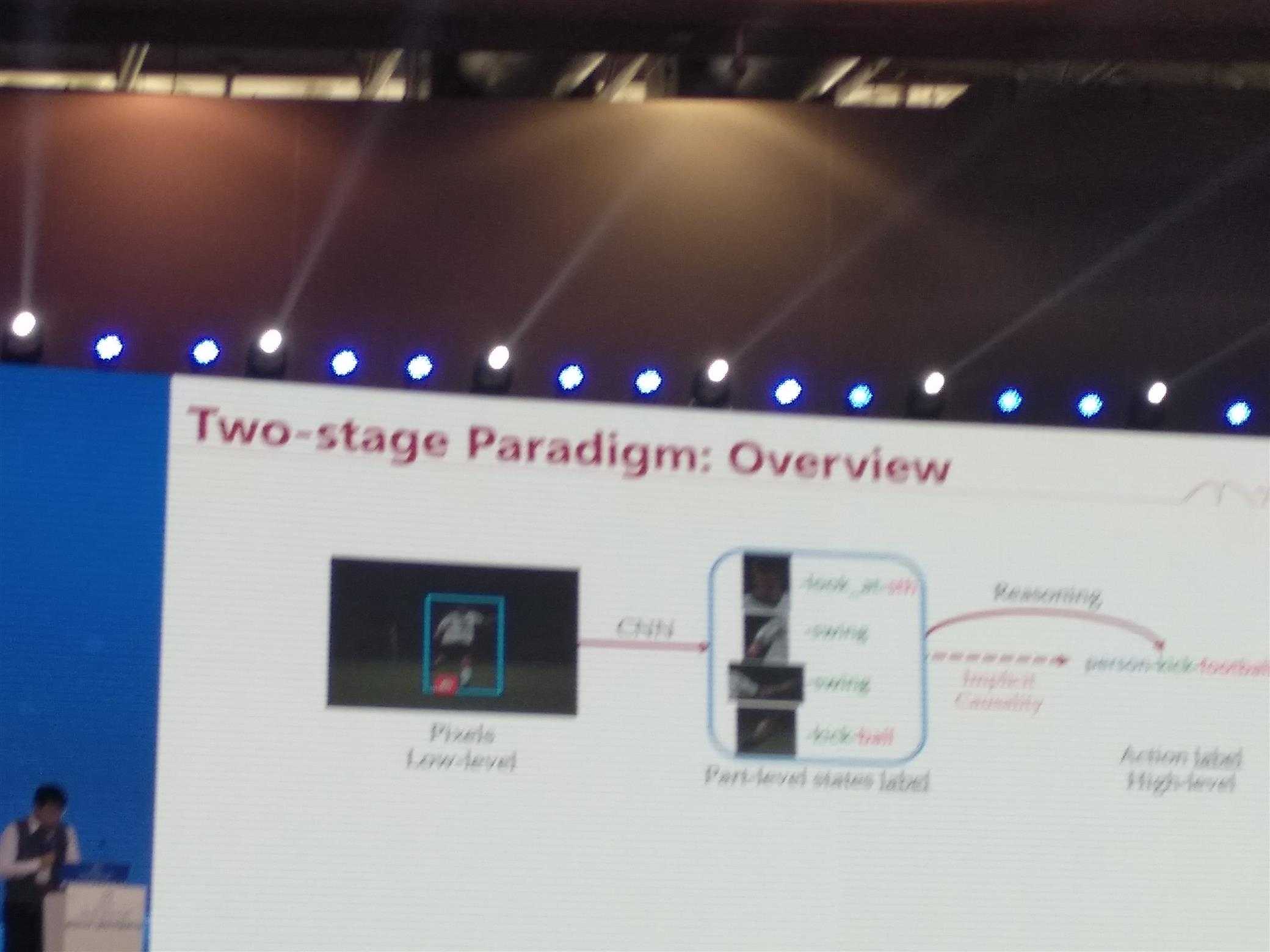
- HAKE:
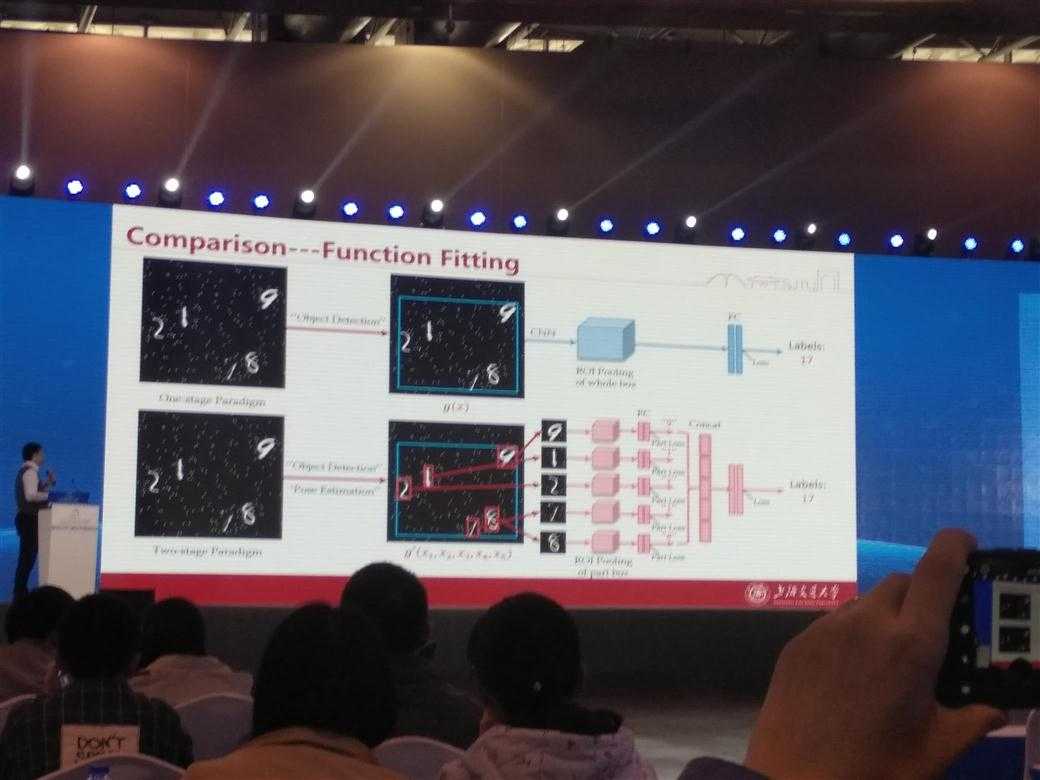
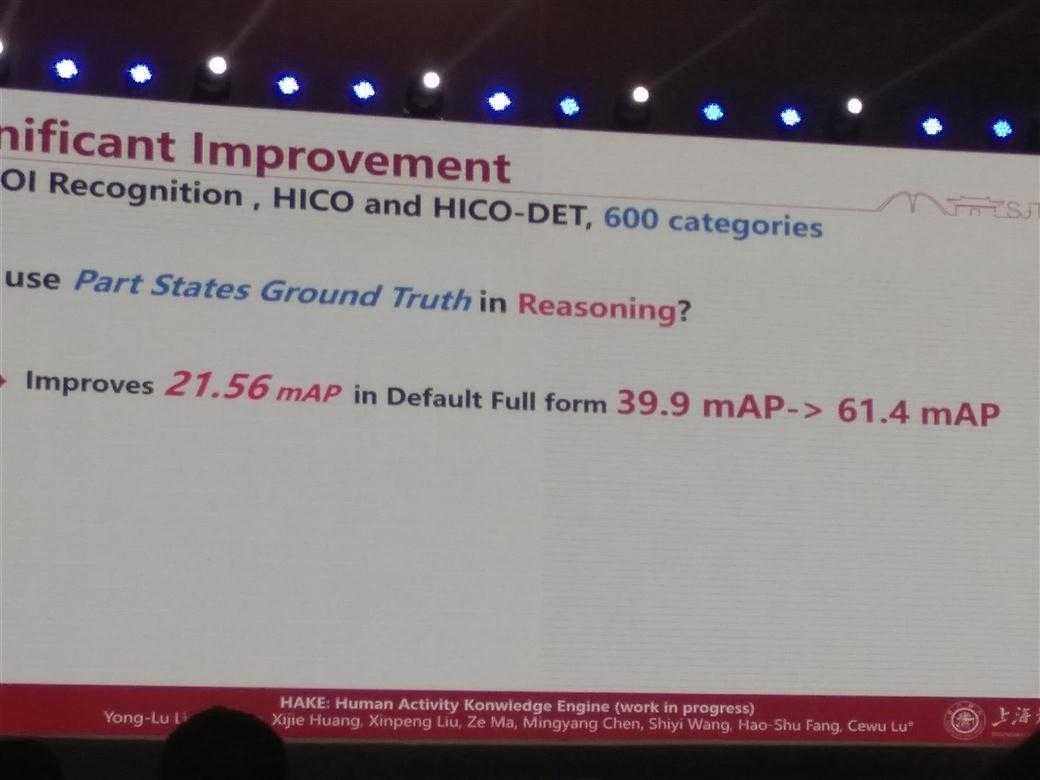
- HAKE based Two-stage paradigm,见图片
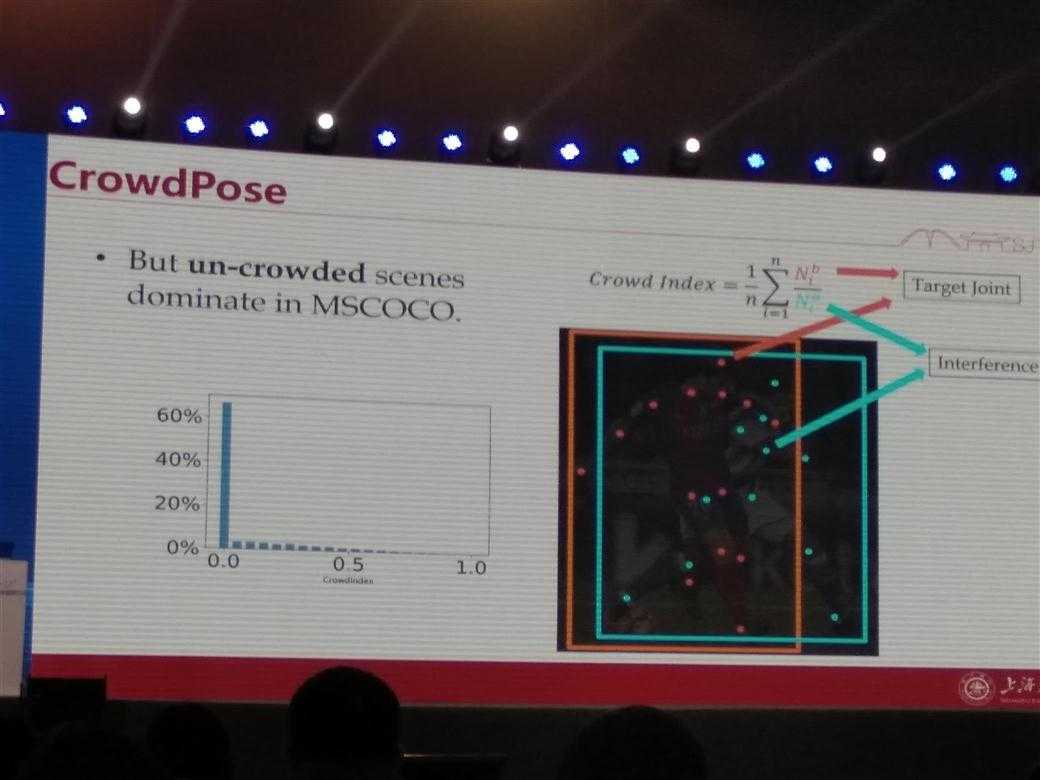
pose - open the door of activity understanding: Alphapose, Crowdpose
sequence modeling: Deep RNN: semi-couple prociple
summary
部分图片,


4.6 人工智能与未来出行
4.7 计算机视觉的下一步:迈向大AI (罗杰波)
4.8 梯度之谜 (孟德宇)
- issue
- limitations of model-driven methodology
- generally with nonconvex model
- only fit one unsupervised image
- slow prediction speed
- limitations of data-driven methodology
- require supervised-data
- black box issue: interpretability
- network parameters/structure are hard/easy to be designed
- 从梯度角度思考,解决上述问题
- 贴图片,有一些论文
VALSE2019总结(4)-主题报告
原文:https://www.cnblogs.com/LS1314/p/10885105.html