mean shift 图像分割
Reference:
[1] Mean shift: A robust approach toward feature space analysis, PAMI, 2002
[2] mean shift,非常好的ppt ,百度文库链接
[3] Pattern Recognition and Machine Learning, Bishop, 2006,Sec 2.5
[4] Computer Vision Algorithms and Applications, Richard Szeliski, 2010, Sec 5.3
[5] Kernel smoothing,MP Wand, MC Jones ,1994, Chapter 4
mean
shift 图像分割 (一): 1 总体思想,2 算法步骤
mean shift 图像分割 (二): 3
算法原理,4 延伸
mean shift 图像分割 (三): 5 非参数密度估计
写在前头的话:这篇笔记看起来公式巨多,实际上只是符号表示,没啥公式推导,不过,多了就难免有差错,欢迎指正。
Mean shitf的故事说来挺励的,早在1975年就诞生了,接着就是漫长的黑暗岁月,黑暗到几乎淡出了人们的视野,不过,命运总是善良的,95年又重新焕发生机,各种应用喷薄而出,包括目标跟踪,边缘检测,非极大值抑制等。这次就只介绍在图像分割中的应用吧,其它的我也没看。Mean shitf过程也充满正能量,描绘的是如何通过自己的努力,一步一步爬上顶峰的故事。
1 总体思想
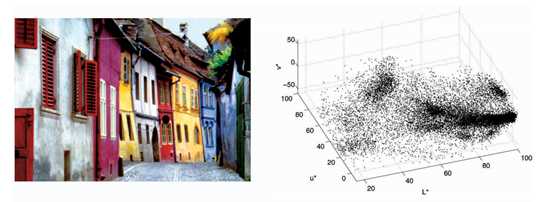
图 1 特征空间映射:RGB图片 -> L-u特征空间
首先meanshift是一种特征空间分析方法,要利用此方法来解决特定问题,需要将该问题映射到特征空间。对于图像分割,我们可以映射到颜色特征空间,比如将RGB图片,映射到Luv特征空间,图1是L-u二维可视化的效果。
图像分割就是求每一个像素点的类标号。类标号取决于它在特征空间所属的cluster。对于每一个cluster,首先得有个类中心,它深深地吸引着一些点,就形成了一个类,即类中心对类中的点构成一个basin of attraction ,好比咱们的太阳系。如此,图像分割问题,就可以看成对每个像素点,找它的类中心问题,因为找到类中心就知道它是属于那一类啦,即类中心一样的点就是一类。
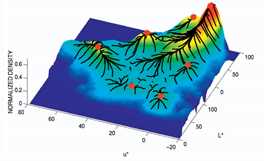
图2标准化后的概率密度可视化效果 -> 聚类分割结果
密度估计的思路需要解决两个问题,what:中心是什么?how:怎么找?mean shift认为中心是概率密度(probalility density function )的极大值点,如图2中的红色点,原文称之为mode,我这暂且用模点吧(某篇论文是如此称呼)。对于每个点怎样找到它的类中心呢?只要沿着梯度方向一步一步慢慢爬,就总能爬到极值点,图2中黑色的线,就是爬坡的轨迹。这种迭代搜索的策略在最优化中称之为 multiple restart gradient descent。不过,一般的gradient descent并不能保证收敛到局部极值,但mean shift 可以做到,因为它的步长是自适应调整的,越靠近极值点步长越小。
也就是说meanshift的核心就两点,密度估计(Density Estimation) 和mode 搜索。对于图像数据,其分布无固定模式可循,所以密度估计必须用非参数估计,选用的是具有平滑效果的核密度估计(Kernel density estimation,KDE)。
2 算法步骤
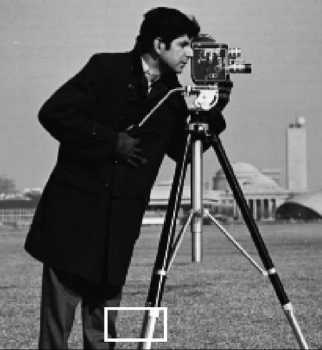
截取这一块可视化
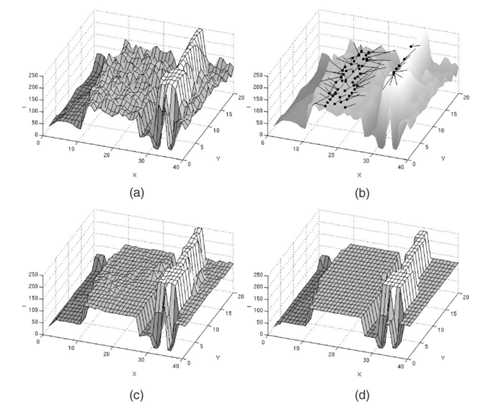
(a)灰度图可视化à(b)mean shift模点路径à(c)滤波后效果à(d)分割结果
分三步走:模点搜索/图像平滑、模点聚类/合并相似区域、兼并小区域(可选)。模点搜索是为了找到每个数据点的到类中心,以中心的颜色代替自己的颜色,从而平滑图像。但模点搜索得到的模点太多,并且很多模点挨得很近,若果将每个模点都作为一类的话,类别太多,容易产生过分割,即分割太细,所以要合并掉一些模点,也就是合并相似区域。模点聚类后所得到的分割区域中,有些区域所包含的像素点太少,这些小区域也不是我们想要的,需要再次合并。
2.1 模点搜索/图像平滑
建议先看[2]中的演示(P4-12)
图像中的点 包括两类信息:坐标空间(spatial,
包括两类信息:坐标空间(spatial, ,
, ),颜色空间(range
,
),颜色空间(range
, ,
, )。这些就构成了特征空间。
)。这些就构成了特征空间。
模点搜索(OpenCV):某一个点 ,它在联合特征空间
,它在联合特征空间 中迭代搜索它的mode/模点
中迭代搜索它的mode/模点 ;
;
图像平滑: 将模点的颜色值赋给它自己,即 .对应原文中的图像平滑,实质上是通过模点搜索,达到图像平滑的效果, 所以我合并为以一步。
.对应原文中的图像平滑,实质上是通过模点搜索,达到图像平滑的效果, 所以我合并为以一步。
设点 依次爬过的脚印为:
依次爬过的脚印为:

出发时 ,它所收敛到的模点为
,它所收敛到的模点为 ,c代表convergence。
,c代表convergence。
第一步:如果迭代次数超过最大值(默认最多爬5次),结束搜索跳到第四步,否则,在坐标空间,筛选靠近 的数据点进入下一步计算。
的数据点进入下一步计算。
OpenCV是以 的坐标
的坐标  为中心,边长为
为中心,边长为 的方形区域
的方形区域 内的数据点。
内的数据点。
其实,本应用 为中心,
为中心, 为半径的圆形区域,那样效果更好,但是循环计算时并不方便,所以用方形区域近似。
为半径的圆形区域,那样效果更好,但是循环计算时并不方便,所以用方形区域近似。
第二步:使用第一步幸存下来的点计算重心,并向重心移动。
写得有点复杂了,下面解释下。 是某种核函数,比如高斯分布,
是某种核函数,比如高斯分布,  是颜色空间的核平滑尺度。OpenCV使用的是最简单的均匀分布:
是颜色空间的核平滑尺度。OpenCV使用的是最简单的均匀分布:
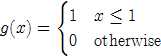
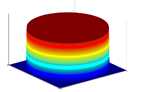
二维可视化效果
 是一个以
是一个以 (第
(第 步位置的颜色值)为球心,半径为
步位置的颜色值)为球心,半径为 的球体,球体内部值为1,球体外部值为0。对于经过上一步筛选后幸存的数据点
的球体,球体内部值为1,球体外部值为0。对于经过上一步筛选后幸存的数据点 ,如果其颜色值
,如果其颜色值 满足
满足 ,也就是颜色值落也在球内,那么求重心
,也就是颜色值落也在球内,那么求重心 时,就要算上
时,就要算上 ,否则落在球外,算重心时,就不带上它。实际上,上一步是依据坐标空间距离筛选数据点,
,否则落在球外,算重心时,就不带上它。实际上,上一步是依据坐标空间距离筛选数据点, 是依据颜色距离进一步筛选数据点,上一步的筛子是矩形,这一步是球体。
是依据颜色距离进一步筛选数据点,上一步的筛子是矩形,这一步是球体。
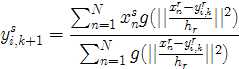
简而言之,设满足 的点依次为
的点依次为 ,那么重心计算公式可以进一步化简为:
,那么重心计算公式可以进一步化简为:
是不是很简单呢,初中知识吧。
注意:上文中的两个参数 ,是Mean
shift最核心的两个参数(还有一个可选的M),具有直观的意义,分别代表坐标空间和颜色空间的核函数带宽。
,是Mean
shift最核心的两个参数(还有一个可选的M),具有直观的意义,分别代表坐标空间和颜色空间的核函数带宽。
第三步:判断是否到模点了,到了就停止。
如果,移动后颜色或者位置变化很小,则结束搜索,跳到第四步,否则重返第一步,从 继续爬。
继续爬。
OpenCV停止搜索的条件:
(1)坐标距离不变
(2)颜色变化值很小 。
。
满足一条就可以功成身退,否则继续努力。
第四步:将模点 的颜色
的颜色 赋给出发点
赋给出发点 /
/ ,即
,即 。
。
注意:原文这一步,不仅将模点的颜色值赋给 ,顺带把坐标值也赋给了
,顺带把坐标值也赋给了 ,也就是说
,也就是说 。
。
2.2 合并相似区域/模点聚类
合并上一步平滑后的图像。OpenCV采用flood fill函数实现,原理很简单,看下wiki的动画就知道了,模拟洪水浸满峡谷的效果。基本上就是区域生长,从某一点出发,如果和它附近的点(4/8邻域)的颜色值相似就合并,同时再从新合并的点出发继续合并下去,直到碰到不相似的点或者该点已经属于另一类了,此时,就退回来,直到退无可退(所有的4/8邻域搜索空间都已经搜索完毕)。
虽然很简单,但是不同的方法还是有很多需要注意的细节问题。这里假设滤波后的图像用 表示。
表示。
滤波后的两个像素点 和
和 ,是否合并,可以使用颜色相似度和空间位置相似性判定。
,是否合并,可以使用颜色相似度和空间位置相似性判定。
OpenCV只考虑颜色相似性,而忽略模点的坐标是否相似。而原算法综合了二者的信息。如果像素点 ,满足
,满足 或者
或者 ,
则这两个像素点就合并。不过OpenCV也是有考虑坐标位置的,它是只考虑原空间的4/8邻域,而原文是考虑特征空间模点的
,
则这两个像素点就合并。不过OpenCV也是有考虑坐标位置的,它是只考虑原空间的4/8邻域,而原文是考虑特征空间模点的 ,相当于说OpenCV的
,相当于说OpenCV的 (原空间)。
(原空间)。
此外,floodfill有一个特点,它不能越过已经被分类的区域,再加上没有第三步,使得OpenCV的结果,真的是惨不忍睹。原文的合并算法,具体怎么合并的还得看源代码。不过,应该不是用flood fill。
《Computer Vision A Modern Approach》中是使用类平均距离判定是否合并。比如, ,
, 能否合并成
能否合并成 ,取决于类平均距离:
,取决于类平均距离:

这样做我觉得效果会更好,因为它不是单独依据边界上的两个点来判定是否合并,它是依据两个区域内部所有的点的信息综合判断。所以,它能合并两个区域,而原算法和OpenCV只能是两个点合并成一个区域,该区域又不断地合并点,一旦一个区域已经完成生长,那么它就不会和别的区域合并了。可以反证。假设先形成 ,区域
,区域 生长的时候把
生长的时候把 给合并了,那么必定有两个点满足相似关系,连接了二者,假设这两个点为
给合并了,那么必定有两个点满足相似关系,连接了二者,假设这两个点为 ,
, 相似,那么
相似,那么 生长的时候就肯定已经把
生长的时候就肯定已经把 点合并进来了,接着把
点合并进来了,接着把 所拥有的区域全盘接收,根本不会让
所拥有的区域全盘接收,根本不会让 区域自成一类。
区域自成一类。
假设合并之后得到m类 。对于原文的算法,每个像素点
。对于原文的算法,每个像素点 的标号
的标号 就是其模点
就是其模点 所属的模点集合的类标号,比如
所属的模点集合的类标号,比如 。不过,OpenCV是
。不过,OpenCV是 所属集合的类标号。
所属集合的类标号。
不过,从原文结果来看,得到的结果并不是类标号,因为类标号一般都是序号,比如1,2,……,然后显示分割结果的时候,就给每一类随机分配一种独有的颜色。但原文的分割结果貌似是这一类的总体颜色值,我猜测原算法可能是用(加权)求平均的方式得到类的颜色值,然后属于这一类的像素点就用这个颜色代替。
注意:这一步实现的是合并相似区域,但本质上还是而是合并模点,或者说模点聚类,因为每个像素点的值,就是它所属模点的颜色值 /模点的联合信息
/模点的联合信息 。
。
2.3 兼并小区域


OpenCV的分割结果
上一步合并了一些模点,但是,对于一些小区域,如果它和周围的颜色差异特别大,那么它们也会自成一类,这些小家伙让需要进一步合并。不过,OpenCV的实现中,并没有包含这一步,所以分割出的结果中包含了太多芝麻大点的区域,本人很不满意,有时间再加进去,还得优化下代码,这个实现实在是太慢了。怎么兼并小的区域呢?原文没说,我也没看他的源代码,我们可以直接将包含像素点少于 的区域与它最相似的区域合并,实际中,小区域往往是被大区域兼并了。
的区域与它最相似的区域合并,实际中,小区域往往是被大区域兼并了。
mean shift 图像分割 (一),布布扣,bubuko.com
原文:http://blog.csdn.net/ttransposition/article/details/38514127