gmapping导航建图包里建图需要里程计信息,且导航也需要。
整个移动机器人的控制结构如下图所示,其中base_controller节点将订阅的cmd_vel信息通过串口或其它通信接口发送给下位机(嵌入式控制板)。下位机中根据机器人运动学公式进行解算,将机器人速度转换为每个轮子的速度,然后通过CAN总线(或其它总线接口)将每个轮子的转速发送给电机驱动板控制电机转动。电机驱动板对电机转速进行闭环控制(PID控制),并统计单位时间内接收到的编码器脉冲数,计算出轮子转速。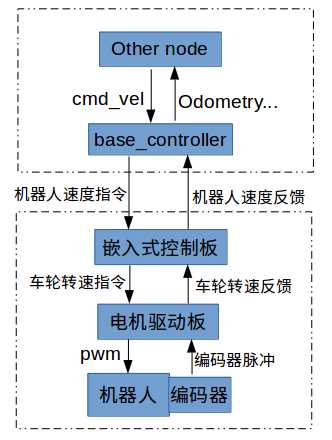
参考:
https://blog.csdn.net/zhu751191958/article/details/79322364
原文:https://www.cnblogs.com/sea-stream/p/11267361.html