上篇博客:霍夫变换(直线检测、圆检测)中谈到关于霍夫变换的原理,但是没有谈到具体实现;
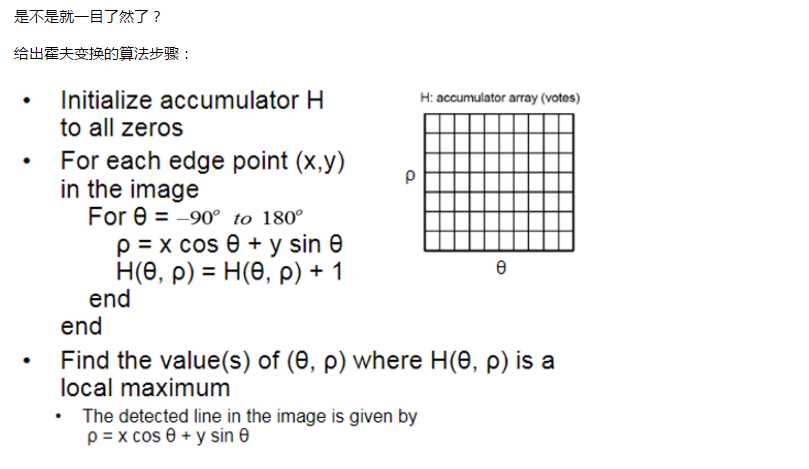
具体的实现如下图:
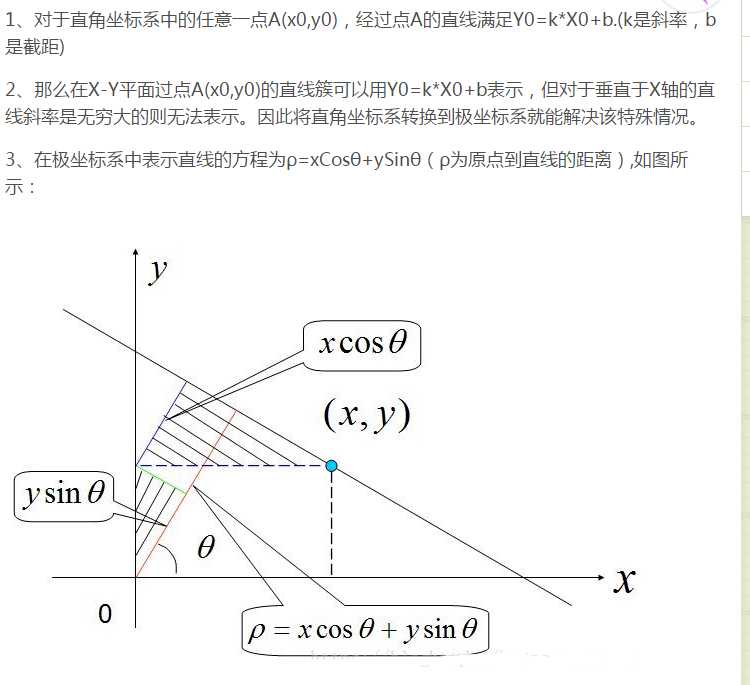
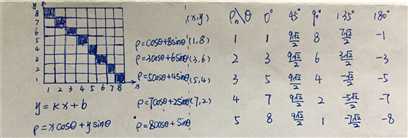
如下图,假定在一个8*8的平面像素中有一条直线,并且从左上角(1,8)像素点开始分别计算θ为0°、45°、90°、135°、180°时的ρ,图中可以看出ρ分别为1、(9√2)/2、8、(7√2)/2、-1,并给这5个值分别记一票,同理计算像素点(3,6)点θ为0°、45°、90°、135°、180°时的ρ,再给计算出来的5个ρ值分别记一票,此时就会发现ρ = (9√2)/2的这个值已经记了两票了,以此类推,遍历完整个8*8的像素空间的时候ρ = (9√2)/2就记了5票, 别的ρ值的票数均小于5票,所以得到该直线在这个8*8的像素坐标中的极坐标方程为 (9√2)/2=x*Cos45°+y*Sin45°,到此该直线方程就求出来了。(PS:但实际中θ的取值不会跨度这么大,一般是PI/180)。
这个网站说明的非常清楚:霍夫线变换¶
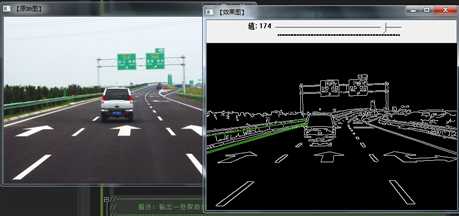
最重要的一句:这就是霍夫线变换要做的. 它追踪图像中每个点对应曲线间的交点. 如果交于一点的曲线的数量超过了 阈值, 那么可以认为这个交点所代表的参数对  在原图像中为一条直线.
在原图像中为一条直线.
下面看看阈值对图像检测的影响
//-----------------------------------【头文件包含部分】---------------------------------------
// 描述:包含程序所依赖的头文件
//----------------------------------------------------------------------------------------------
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
//-----------------------------------【命名空间声明部分】--------------------------------------
// 描述:包含程序所使用的命名空间
//-----------------------------------------------------------------------------------------------
using namespace std;
using namespace cv;
//-----------------------------------【全局变量声明部分】--------------------------------------
// 描述:全局变量声明
//-----------------------------------------------------------------------------------------------
Mat g_srcImage, g_dstImage, g_midImage;//原始图、中间图和效果图
vector<Vec4i> g_lines;//定义一个矢量结构g_lines用于存放得到的线段矢量集合
//变量接收的TrackBar位置参数
int g_nthreshold = 100;
//-----------------------------------【全局函数声明部分】--------------------------------------
// 描述:全局函数声明
//-----------------------------------------------------------------------------------------------
static void on_HoughLines(int, void*);//回调函数
static void ShowHelpText();
//-----------------------------------【main( )函数】--------------------------------------------
// 描述:控制台应用程序的入口函数,我们的程序从这里开始
//-----------------------------------------------------------------------------------------------
int main()
{
//改变console字体颜色
system("color 3F");
ShowHelpText();
//载入原始图和Mat变量定义
Mat g_srcImage = imread("E:\\VS2015Opencv\\vs2015\\project\\picture\\07.jpg"); //该目录下应该有一张名为07.jpg的素材图
//显示原始图
imshow("【原始图】", g_srcImage);
//创建滚动条
namedWindow("【效果图】", 1);
createTrackbar("值", "【效果图】", &g_nthreshold, 200, on_HoughLines);
//进行边缘检测和转化为灰度图
Canny(g_srcImage, g_midImage, 50, 200, 3);//进行一次canny边缘检测
cvtColor(g_midImage, g_dstImage, CV_GRAY2BGR);//转化边缘检测后的图为灰度图
//调用一次回调函数,调用一次HoughLinesP函数
on_HoughLines(g_nthreshold, 0);
HoughLinesP(g_midImage, g_lines, 1, CV_PI / 180, 80, 50, 10);
//显示效果图
imshow("【效果图】", g_dstImage);
waitKey(0);
return 0;
}
//-----------------------------------【on_HoughLines( )函数】--------------------------------
// 描述:【顶帽运算/黑帽运算】窗口的回调函数
//----------------------------------------------------------------------------------------------
static void on_HoughLines(int, void*)
{
//定义局部变量储存全局变量
Mat dstImage = g_dstImage.clone();
Mat midImage = g_midImage.clone();
//调用HoughLinesP函数
vector<Vec4i> mylines;
HoughLinesP(midImage, mylines, 1, CV_PI / 180, g_nthreshold + 1, 50, 10);
//循环遍历绘制每一条线段
for (size_t i = 0; i < mylines.size(); i++)
{
Vec4i l = mylines[i];
line(dstImage, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(23, 180, 55), 1, CV_AA);
}
//显示图像
imshow("【效果图】", dstImage);
}
//-----------------------------------【ShowHelpText( )函数】----------------------------------
// 描述:输出一些帮助信息
//----------------------------------------------------------------------------------------------
static void ShowHelpText()
{
//输出一些帮助信息
printf("\n\n\n\t请调整滚动条观察图像效果~\n\n");
printf("\n\n\t\t\t\t\t\t\t\t by_ly"
);
}

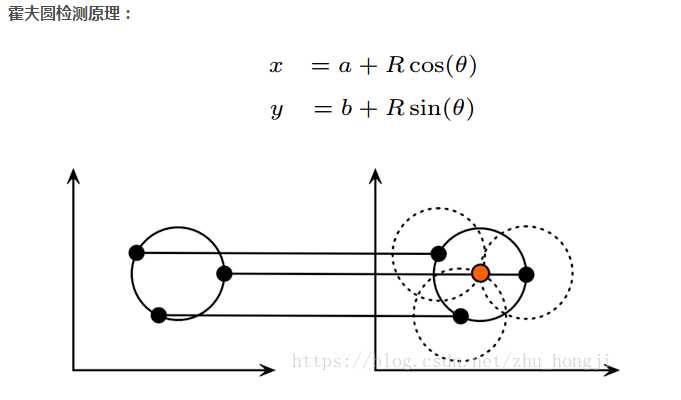
从平面坐标到极坐标转换三个参数C(x0,y0,r), 是圆心
假设平面坐标的任意一个圆上的点,转换到极坐标中: 处有最大值,霍夫变换正是利用这个原理实现圆的检测。
参考这个网站:霍夫圆变换¶
原文:https://www.cnblogs.com/fcfc940503/p/11305092.html