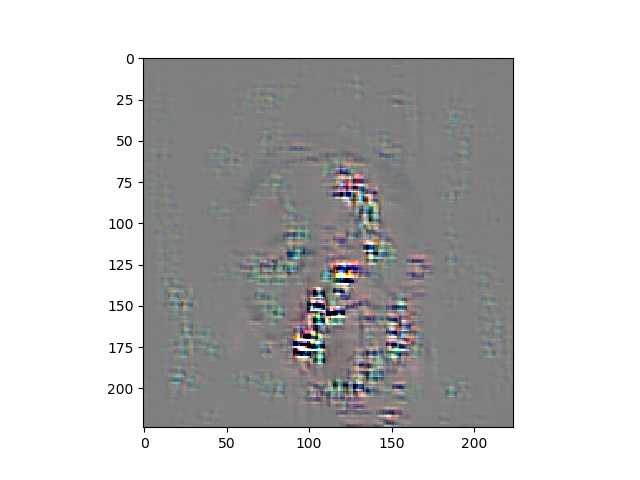
guided backpropgation通过修改RELU的梯度反传,使得小于0的部分不反传,只传播大于0的部分,这样到第一个conv层的时候得到的梯度就是对后面relu激活起作用的梯度,这时候我们对这些梯度进行可视化,得到的就是对网络起作用的区域。(实际上可视化的是梯度)。
简单记一下。用到hook的神经网络可视化方法。
import torch
import torch.nn as nn
from torchvision import transforms,models
import re
from models.densenet import densenet121
from PIL import Image
import numpy as np
import matplotlib.pyplot as plt
class Guided_Prop():
def __init__(self,model):
self.model = model
self.model.eval()
self.out_img = None
self.activation_maps = []
def register_hooks(self):
def register_first_layer_hook(module,grad_in,grad_out):
self.out_img = grad_in[0] #(b,c,h,w) -> (c,h,w)
def forward_hook_fn(module,input_feature,output_feature):
self.activation_maps.append(output_feature)
def backward_hook_fn(module,grad_in,grad_out):
grad = self.activation_maps.pop()
grad[grad > 0] = 1
g_positive = torch.clamp(grad_out[0],min = 0.)
result_grad = grad * g_positive
return (result_grad,)
modules = list(self.model.features.named_children())
for name,module in modules:
if isinstance(module,nn.ReLU):
module.register_forward_hook(forward_hook_fn)
module.register_backward_hook(backward_hook_fn)
first_layer = modules[0][1]
first_layer.register_backward_hook(register_first_layer_hook)
def visualize(self,input_image):
softmax = nn.Softmax(dim = 1)
idx_tensor = torch.tensor([float(i) for i in range(61)])
self.register_hooks()
self.model.zero_grad()
out = self.model(input_image) # [[b,n],[b,n],[b,n]]
yaw = softmax(out[0])
yaw = torch.sum(yaw * idx_tensor,dim = 1) * 3 - 90.
pitch = softmax(out[1])
pitch = torch.sum(pitch * idx_tensor,dim = 1) * 3 - 90.
roll = softmax(out[2])
roll = torch.sum(roll * idx_tensor,dim = 1) * 3 - 90.
#print(yaw)
out = yaw + pitch + roll
out.backward()
result = self.out_img.data[0].permute(1,2,0) # chw -> hwc(opencv)
return result.numpy()
def normalize(I):
norm = (I-I.mean())/I.std()
norm = norm * 0.1
norm = norm + 0.5
norm = norm.clip(0, 1)
return norm
if __name__ == "__main__":
input_size = 224
model = densenet121(pretrained = False,num_classes = 61)
model.load_state_dict(torch.load("./ckpt/DenseNet/model_2692_.pkl"))
img = Image.open("/media/xueaoru/其他/ML/head_pose_work/brick/head_and_heads/test/BIWI00009409_-17_+1_+17.png")
transform = transforms.Compose([
transforms.Resize(input_size),
transforms.CenterCrop(input_size),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
])
tensor = transform(img).unsqueeze(0).requires_grad_()
viz = Guided_Prop(model)
result = viz.visualize(tensor)
result = normalize(result)
plt.imshow(result)
plt.show()
由于是多任务问题,所以直接拿结果反传,对于一般的分类问题,可以给定target来用gt用one-hot反传。
head pose estimation 的梯度可视化。

[torch] Guided Backpropgation 可视化
原文:https://www.cnblogs.com/aoru45/p/11347226.html