| 变量 | 描述 |
|---|---|
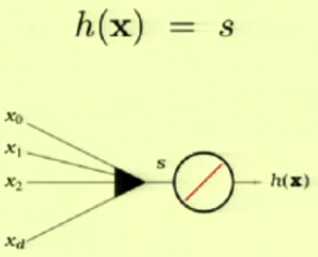
| \(h\) | 假设式 |
| \(w\) | 权值 |
| \(x\) | 输入 |
| \(f\) | 目标函数 |
| \(b\) | 偏差 |
| \(d\) | 输入特征个数 |
| 字体 | 描述 |
|---|---|
| \(x\) | 单一变量 |
| \(\mathtt x\) | 向量 |
| \(\mathtt{X}\) | 矩阵 |
线性回归,回归是指实值输出
线性回归尝试得到输入与输出的线性联系
这里使用平方误差\((h(\mathtt x)-f(\mathtt x))^2\)
\(E_{in}(\mathtt w)=\frac{1}{N}\sum_{n=1}^{N}(h(\mathtt x)-y_n)^2\)
? \(=\frac{1}{N}\sum_{n=1}^{N}(\mathtt{w^Tx_n-}y_n)^2\)$
? \(=\frac{1}{N}||\mathtt{Xw-y}||^2\)
\(\mathtt X=\begin{bmatrix} {\mathtt x_1^T}\\ {\mathtt x_2^T}\\ {\vdots}\\ {\mathtt x_N^T}\\\end{bmatrix}\) \(\mathtt X\in R^{N*(d+1)}\),\(\mathtt y=\begin{bmatrix} {y_1}\\ {y_2}\\ {\vdots}\\ {y_N}\\\end{bmatrix}\) \(\mathtt y\in R^{N*1}\)
令其导数为零即可得到解
\(\nabla E_{in}(\mathtt w)=\frac{2}{N}\mathtt X^T(\mathtt{Xw-y})=0\)
\(\mathtt{X^TXw=X^Ty}\)
\(\mathtt{w=(X^TX)^{-1}X^Ty}\)
\(\mathtt{(X^TX)^{-1}X^T}\)称作\(\mathtt X\)得伪逆矩阵,因为\(\mathtt{X}\)往往不是一个方矩阵

这也称作一步学习,因为只需求出输入矩阵的为逆矩阵学习就差不多结束了
线性回归就像是一辆公交车,很方便,虽然不会让你觉着威风.
线性回归也可以作为其他方法权值的初始化,例如PLA,虽然这不是最好的结果,但是一个相对较好的结果,如果PLA使用随机的权值开始到达这个较好的结果会花费很多时间,线性回归的性质使得这一步很容易到达.而且从一个较好的权值开始,PLA也会很快的收敛到最优解或者局部最优解
原文:https://www.cnblogs.com/redo19990701/p/11398740.html