介绍官网:https://docs.opencv.org/3.0-beta/doc/py_tutorials/py_feature2d/py_sift_intro/py_sift_intro.html
在极值点的精确定位后,还需要为找到的特征点进行方向匹配;
特征点方向分配:
可参考:SIFT算法详解和SIFT算法原理详解
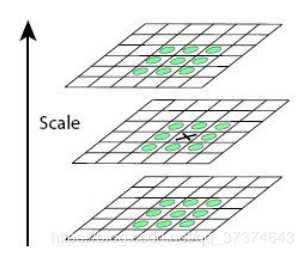
对于在DOG金字塔中检测出的关键点点,采集其所在高斯金字塔图像3σ领域窗口内像素的梯度和方向分布特征。梯度的模值和方向如下:

做一个梯度方向的直方图,范围是0~360度,其中每10度一个柱,总共36个柱。每个采样点按照其梯度方向θ(x,y)加权统计到直方图,权值为幅度m(x,y )和贡献因子的乘积。贡献因子是采样点到关键点(窗口中心)距离的量度,距离越大,贡献因子越小.直方图的峰值代表了该关键点处邻域梯度的主方向.
Lowe指出,直方图的峰值确定以后,任何大于峰值80%的方向(柱)创建一个具有该方向的关键点,因此,对于多峰值(幅值大小接近)的情形,在同一位置和尺度就会产生多个具有不同方向的关键点。虽然这样的点只占15%,但是它们却能显著地提高匹配的稳定性。用每个峰值和左右两个幅值拟合二次曲线,以定位峰值的实际位置(抛物线的最高点)。峰值方向的精度高于10度。
SIFT算法原理(总结篇)-确定关键点的主方位,构建关键点描述
原文:https://www.cnblogs.com/fcfc940503/p/11492540.html