---恢复内容开始---
ubuntu 18.04 +opencv3.1.中间踩过很多坑,但是好些坑都忘了怎么解决的了。当时没有做笔记真是可惜了。
第三章 三维空间刚体运动
3.1 useEigen-eigenMatrix.cpp
3.2 Eigen几何模块

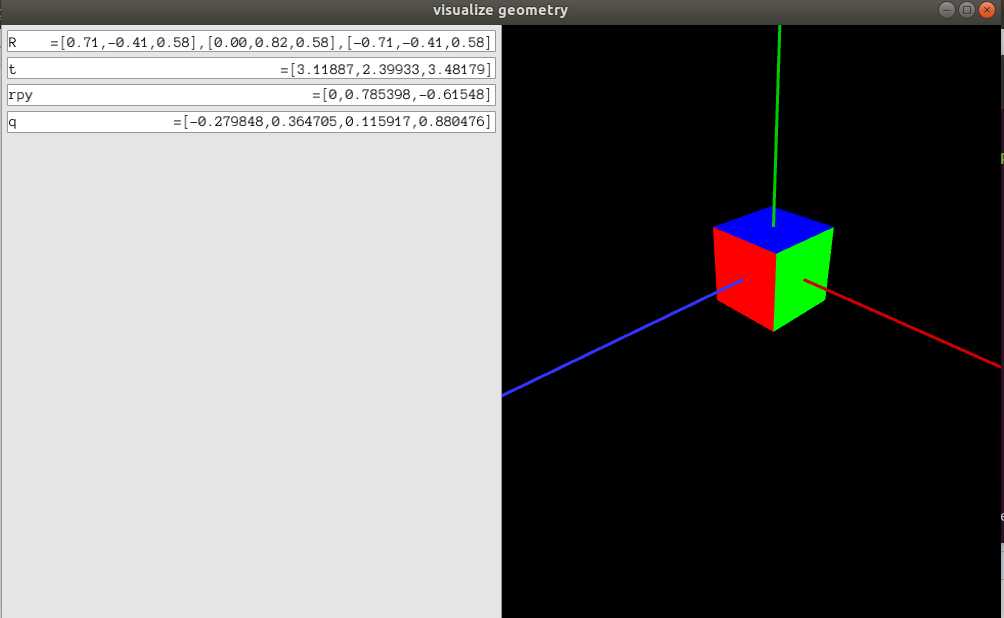
这里可能有问题,还没看源代码 输出了3.4转换坐标的例子。可能改cmake 的时候除了问题,我先写完,有空回来改
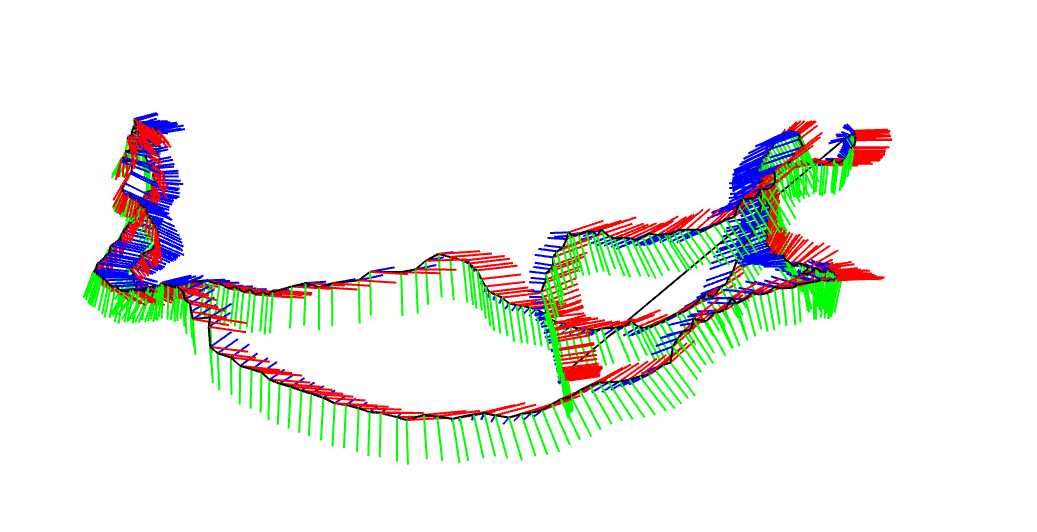
example/plotTrajectory.cpp 位姿可视化
注意其位姿文件存放位置要在上一层或者自己改源程序。
3.4显示相机位姿
第四章 李群李代数
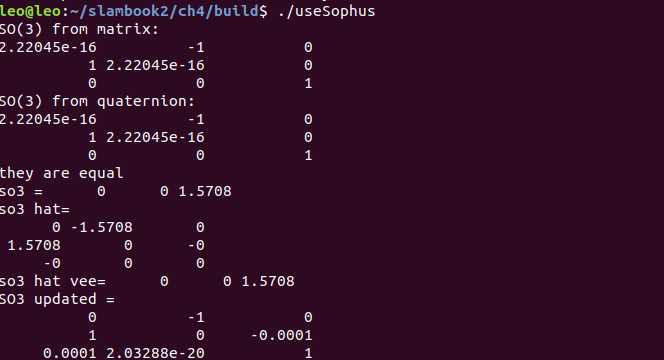
4.1 useSophus.cpp
4.2评估轨迹的误差
第五章 相机与图像
5.1 opencv基本使用方法
5.2 去畸变 undistortImage

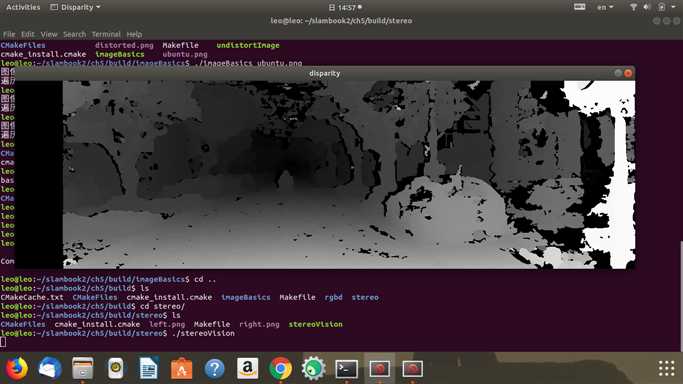
5.3双目视觉
stereovision.cpp
左眼图像

右眼图像

视差图
点云图




 5.4RGB-D视觉
5.4RGB-D视觉
jointMAP.CPP

第六章 非线性优化
6.1 手写高斯牛顿
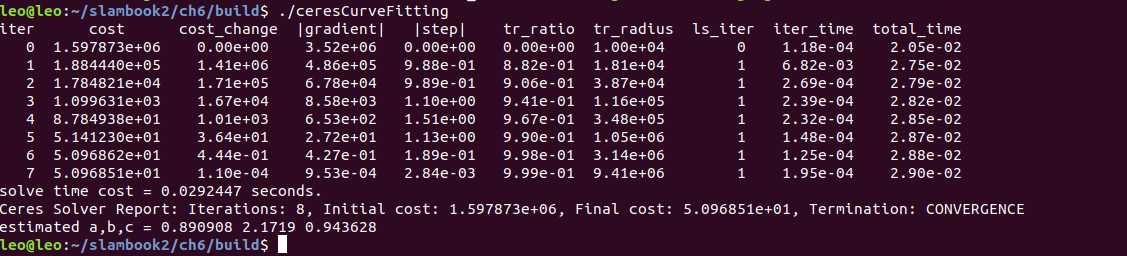
 6.2使用ceres进行曲线拟合
6.2使用ceres进行曲线拟合
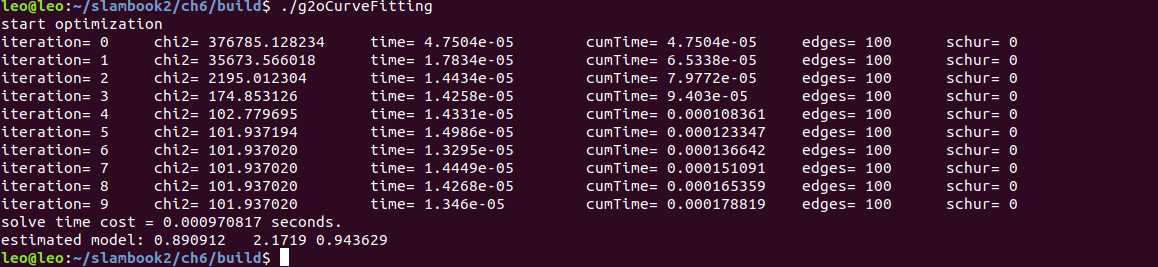
6.3使用g2o进行曲线拟合
第七章 视觉里程计
7.1 opencv的ORB特征
orb_cv.cpp
ORB关键点

未筛选的匹配

筛选后的匹配

7.2手写ORB特征

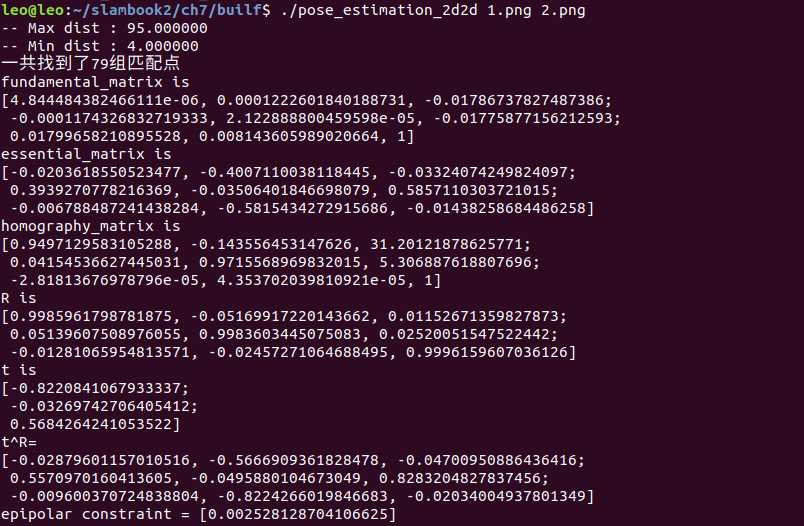
7.3对极几何求解相机运动
pose_estimation_2d2d.cpp
7.4三角测量
triangulation.cpp

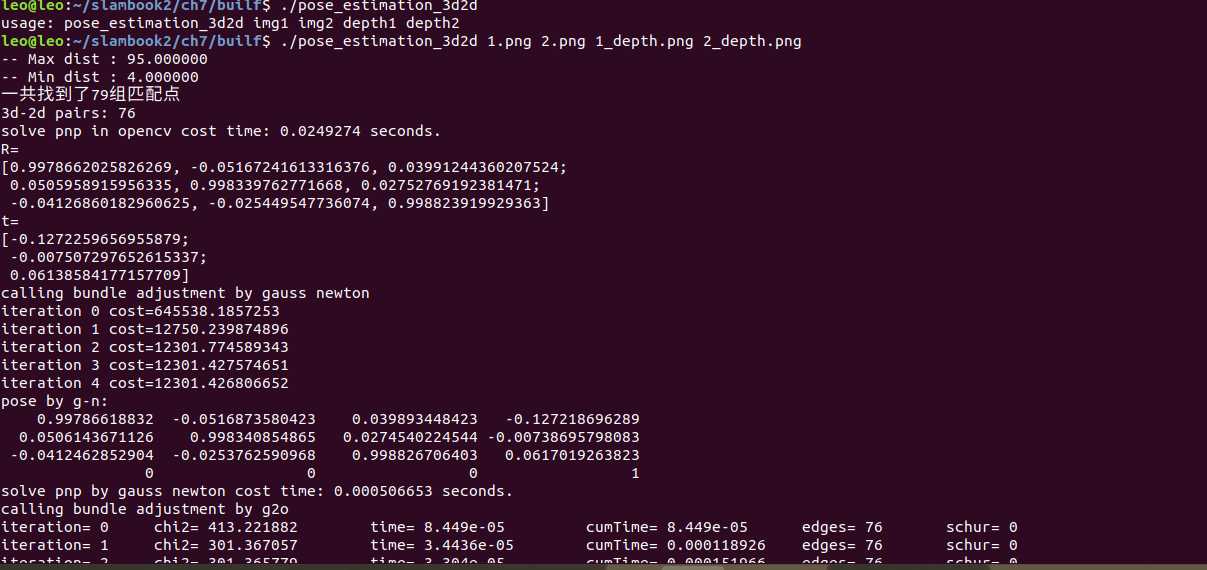
7.5使用g2o进行BA优化
pose_estimation_3d2d.cpp
pose_estimation_3d2d.cpp
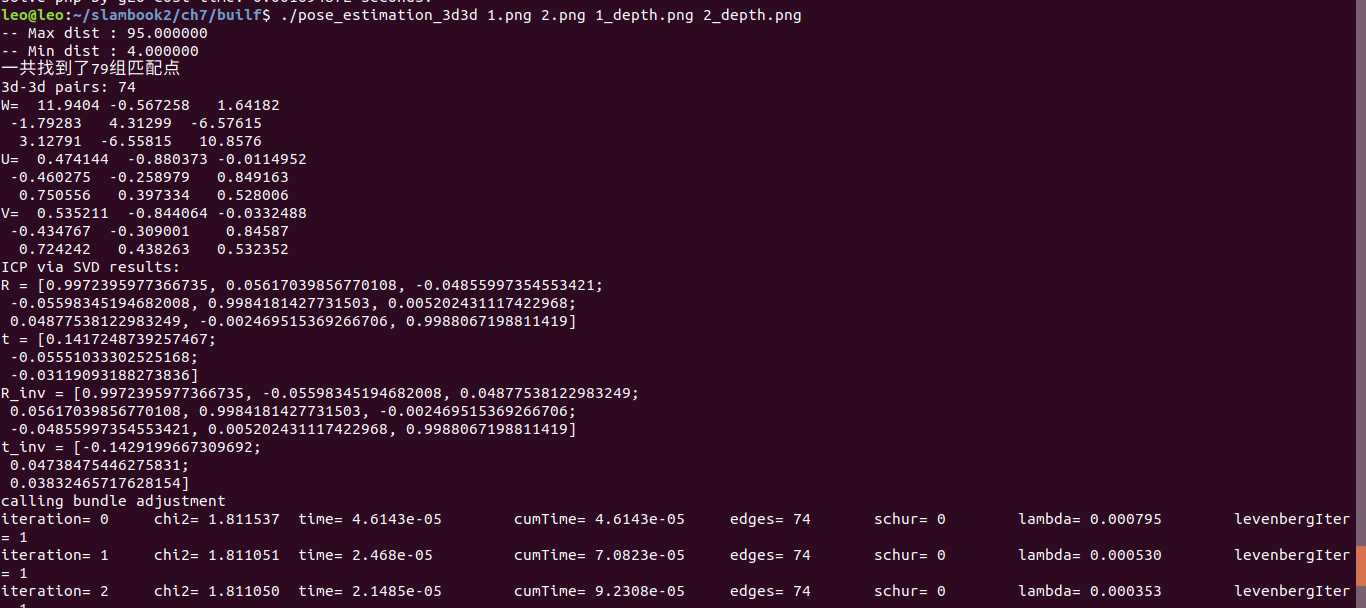
7.6 SVD方法
pose_estimation_3d3d.cpp
第八章 视觉里程计2
8.1 使用LK光流
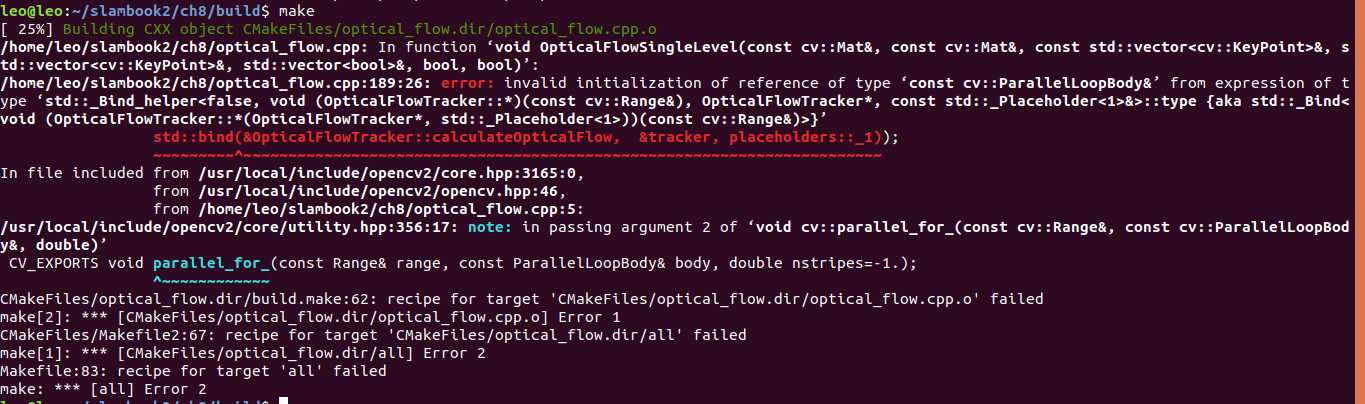
第八章这里make的时候出现了问题,可能入参有问题。先放着‘
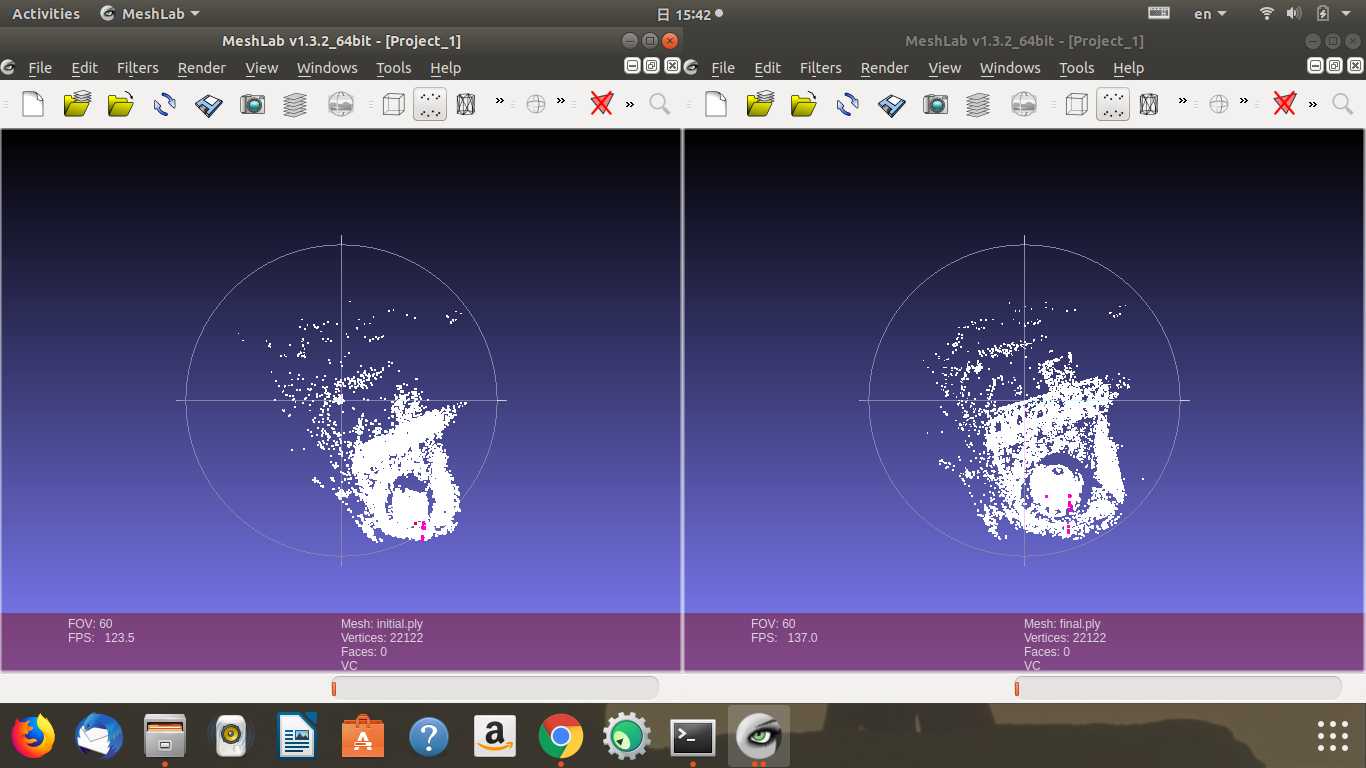
第九章后端1
9.1 Ceres BA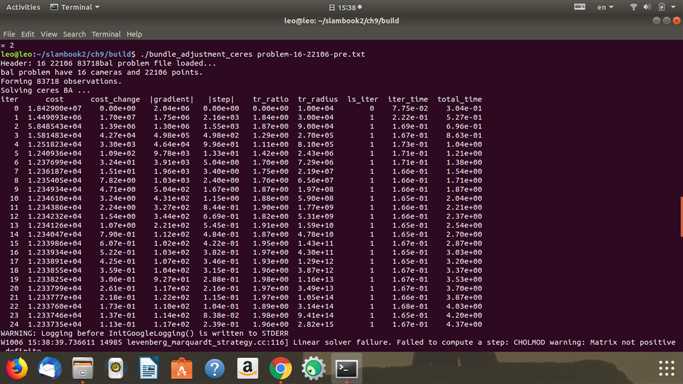
9.2 g2o求解BA
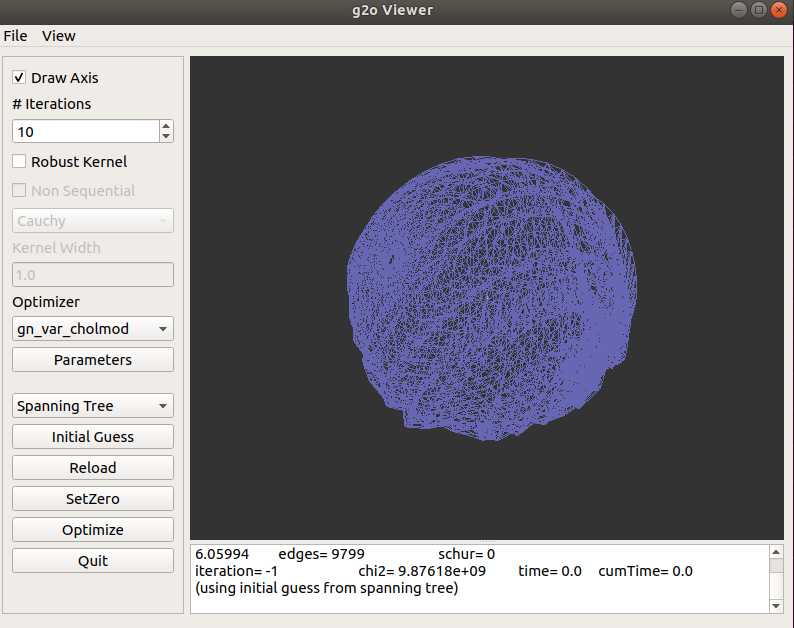
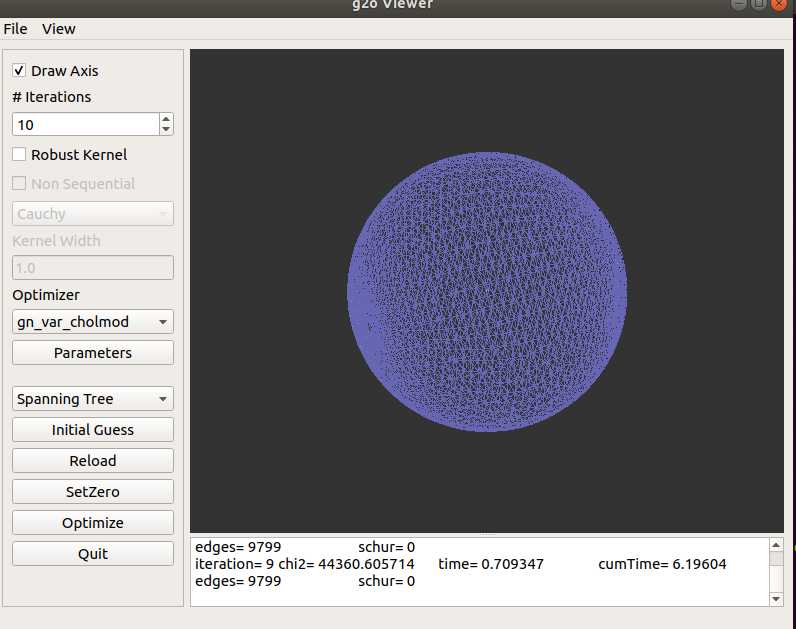
第十章 后端2
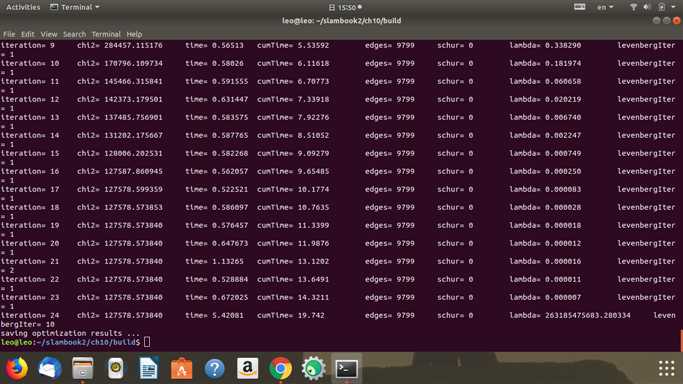
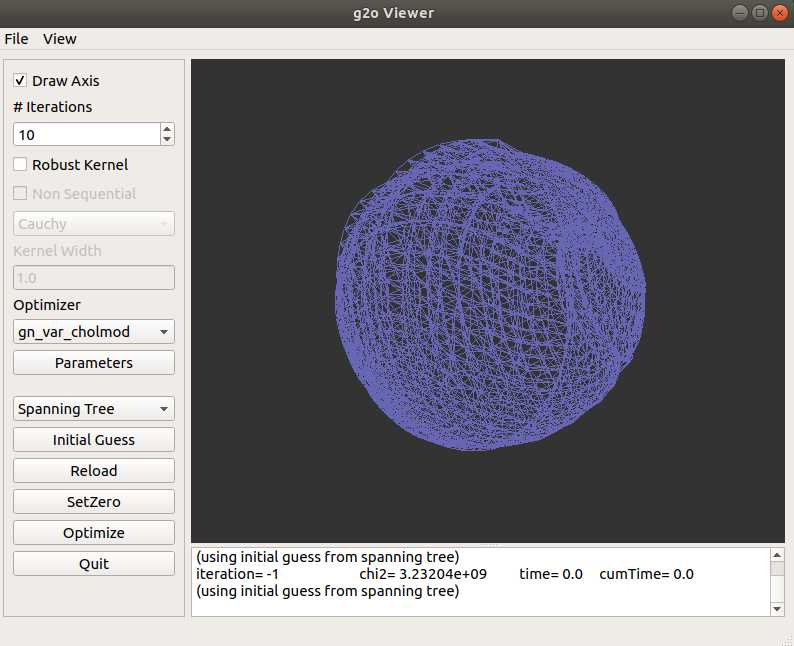
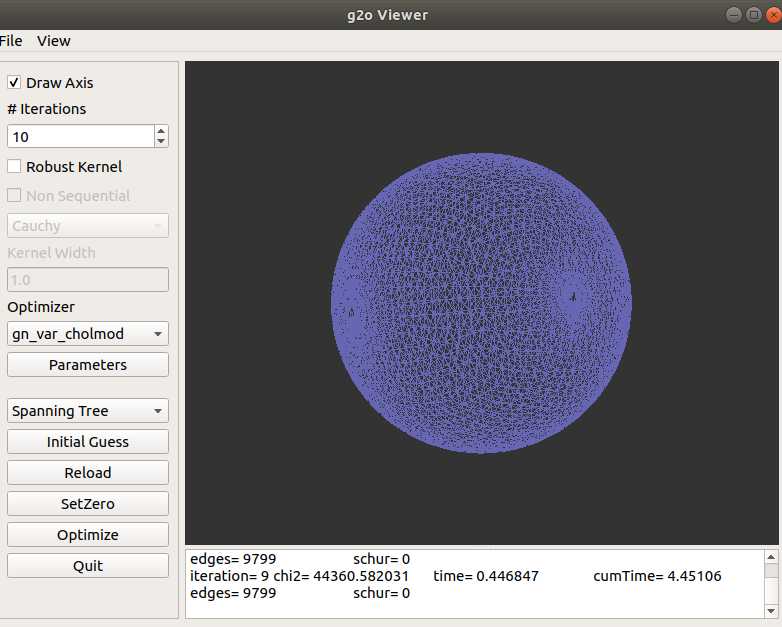
10.1 g2o原生位姿图
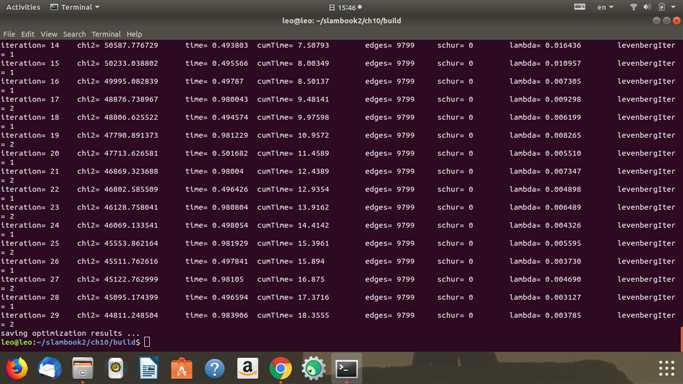
10.2 李代数上的位姿图优化
第11章 回环检测
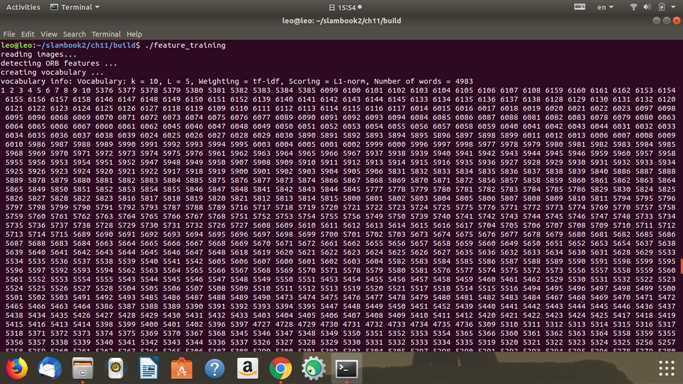
11.1训练字典
feature_training
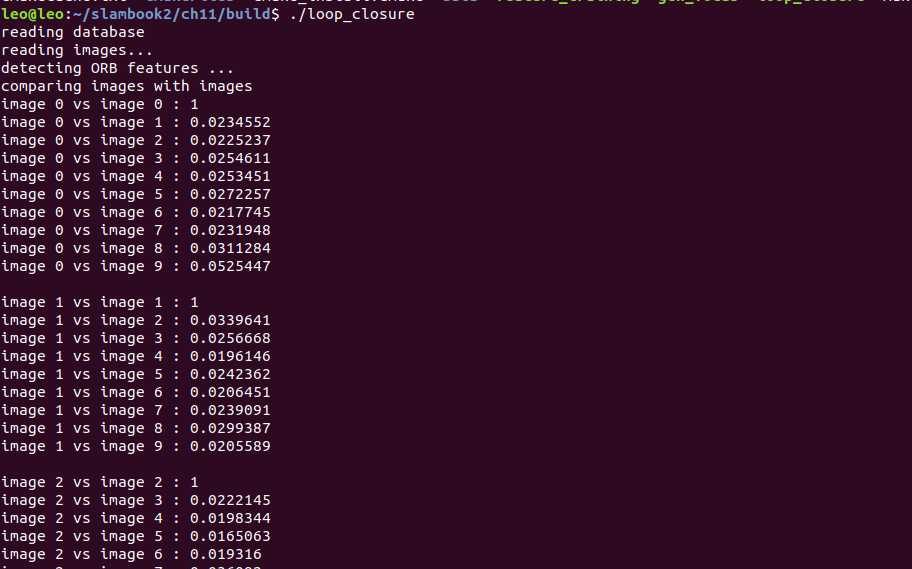
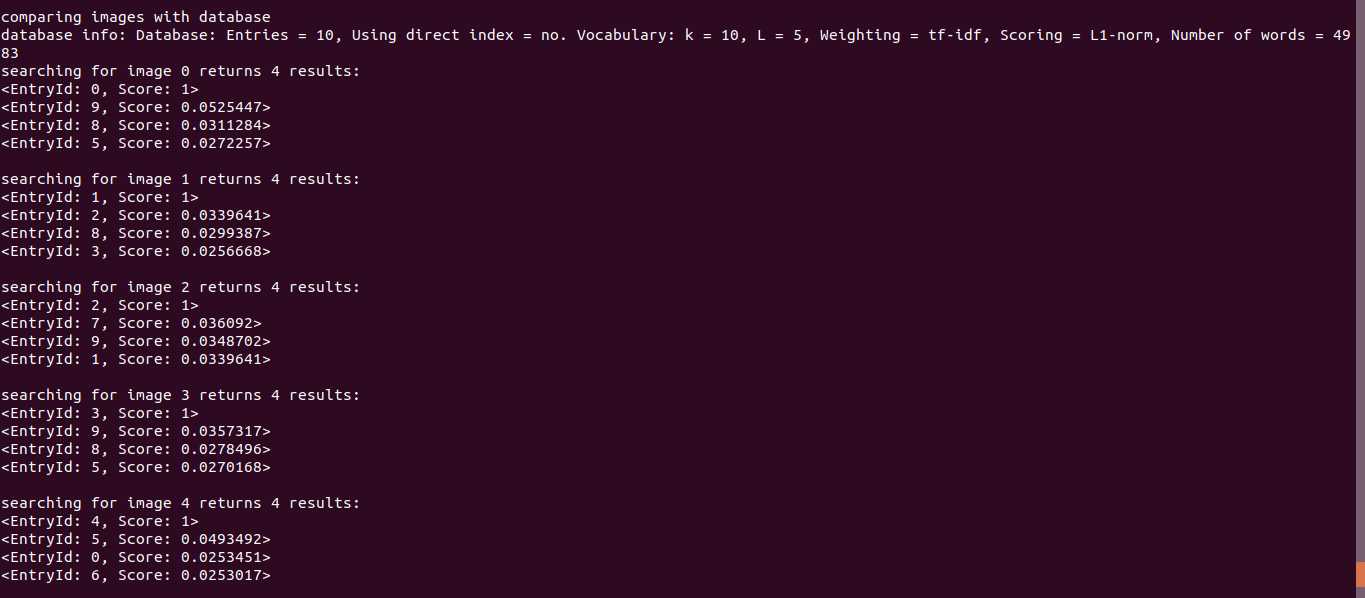
11.2 相似度计算
loop_closure.cpp
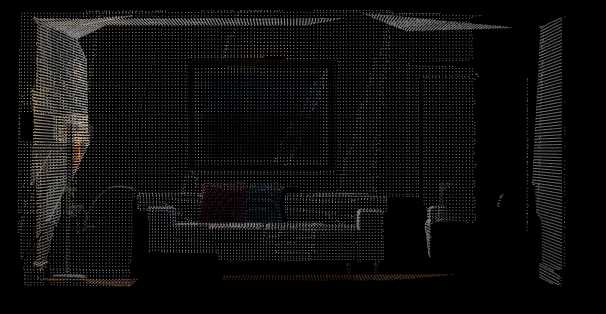
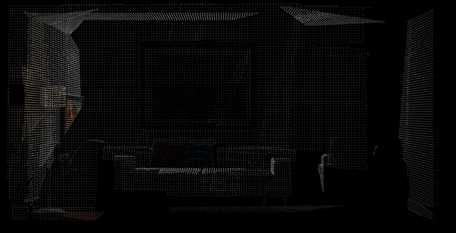
第12章 建图
12.1 单目稠密建图 数据集还没下载
12.2 RGB-D 稠密地图
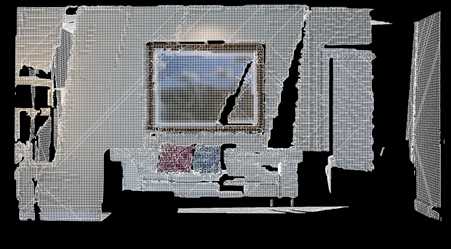
12.3从点云重建网格图
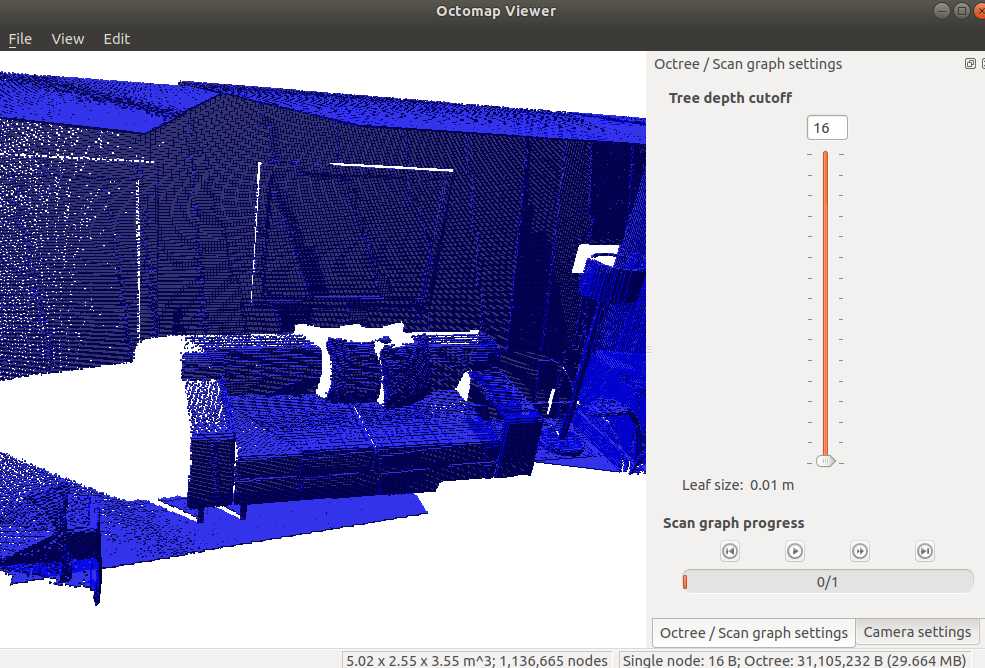
12.4 八叉树地图
第十三章 设计SLAM系统
原文:https://www.cnblogs.com/Lei-HongweiNO11/p/11626814.html