


#define UART_BPS 115200 /* 定义通讯波特率 */
/**********************************************************************************************
** 函数名称: UART0_Ini
** 函数功能:初始化串口 0 。设置为 8 位数据位, 1 位停止位,无奇偶校验,波特率为 115200
**********************************************************************************************/
void UART0_Ini(void)
{
uint32_t Fdiv = 0;
U0LCR = 0x83; /* DLAB = 1 ,可设置波特率 */
Fdiv = (Fpclk / 16) / UART_BPS; /* 设置波特率 */
U0DLM = Fdiv / 256;
U0DLL = Fdiv % 256;
U0LCR = 0x03; /* 锁定除数访问 */
U0FCR = 0x07; /* 使能并复位 FIFO */
}#define UART_BPS 115200 /* 定义通讯波特率 *//************************************************************************************************ 函数名称: UART0_Ini** 函数功能:初始化串口 0 。设置为 8 位数据位, 1 位停止位,无奇偶校验,波特率为 115200**********************************************************************************************/void UART0_Ini(void){ uint32_t Fdiv = 0; U0LCR = 0x83; /* DLAB = 1 ,可设置波特率 */ Fdiv = (Fpclk / 16) / UART_BPS; /* 设置波特率 */ U0DLM = Fdiv / 256; U0DLL = Fdiv % 256; U0LCR = 0x03; /* 锁定除数访问 */ U0FCR = 0x07; /* 使能并复位 FIFO */}

/**********************************************************************************************
** 函数名称: UART0_SendByte
** 函数功能:向串口发送字节数据,并等待发送完毕
** 入口参数: data 要发送的数据
** 出口参数:无
**********************************************************************************************/
void UART0_SendByte(uint8 data)
{
U0THR = data; /* 发送数据 */
while ( (U0LSR&0x40)==0 ); /* 等待数据发送完毕 */
}/************************************************************************************************ 函数名称: UART0_SendByte** 函数功能:向串口发送字节数据,并等待发送完毕** 入口参数: data 要发送的数据** 出口参数:无**********************************************************************************************/void UART0_SendByte(uint8 data){U0THR = data; /* 发送数据 */while ( (U0LSR&0x40)==0 ); /* 等待数据发送完毕 */}
/**********************************************************************************************
** 函数名称: UART0_RcvByte
** 函数功能:从串口接收一个字节的数据。使用查询方式
** 入口参数:无
** 出口参数:返回接收到的数据
**********************************************************************************************/
uint8 UART0_RcvByte(void)
{
uint8 rcv_data;
while ((U0LSR&0x01) == 0); /* 查询数据是否接收完毕 */
rcv_data = U0RBR;
return (rcv_data);
}/************************************************************************************************ 函数名称: UART0_RcvByte** 函数功能:从串口接收一个字节的数据。使用查询方式** 入口参数:无** 出口参数:返回接收到的数据**********************************************************************************************/uint8 UART0_RcvByte(void){uint8 rcv_data;while ((U0LSR&0x01) == 0); /* 查询数据是否接收完毕 */rcv_data = U0RBR;return (rcv_data);}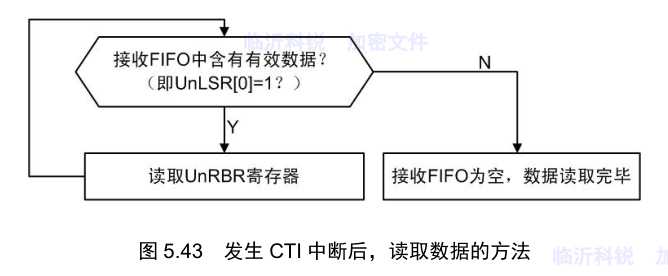
/**********************************************************************************************
** 函数名称: UART_Exception
** 函数功能:串口中断服务程序
**********************************************************************************************/
void UART_Exception(void)
{
……
switch(U0IIR & 0x0f)
{
case 0x04 : /* 发生 RDA 中断 */
/*
** 从接收 FIFO 中读取数据
*/
break;
case 0x0c : /* 发生字符超时中断 ——CTI */
while((U0LSR & 0x01) == 1) {
/*
** 如果接收 FIFO 中含有有效数据,就读取 UnRBR 寄存器
*/
RcvData[i++] = U0RBR;
break;
……
default :
break;
}
……
}/************************************************************************************************ 函数名称: UART_Exception** 函数功能:串口中断服务程序**********************************************************************************************/void UART_Exception(void){……switch(U0IIR & 0x0f){case 0x04 : /* 发生 RDA 中断 *//*** 从接收 FIFO 中读取数据*/break;case 0x0c : /* 发生字符超时中断 ——CTI */while((U0LSR & 0x01) == 1) { /*** 如果接收 FIFO 中含有有效数据,就读取 UnRBR 寄存器*/RcvData[i++] = U0RBR;break; ……default :break;}……}#ifndef __DEBUGSERIAL_H_
#define __DEBUGSERIAL_H_
#include "sys.h"
#include "stdio.h"
extern u8 serialBuffer[256];
extern u16 serialStatus;
void Debug_Serial_Init(u32 baud);
void Debug_Serial_Send_Byte(u8 dat);
void Debug_Serial_Send_Buffer(u8 length,u8* buffer);
#endif
#include "debugSerial.h"
//加入printf支持
#pragma import(__use_no_semihosting)
struct __FILE
{
int handle;
/* Whatever you require here. If the only file you are using is */
/* standard output using printf() for debugging, no file handling */
/* is required. */
};
FILE __stdout;
_sys_exit(int x)
{
x = x;
}
int fputc(int ch, FILE *f)
{
while(!((LPC_UART0->LSR) & 0x20)); //等待判断LSR[5](即THRE)是否是1,1时表示THR中为空
LPC_UART0->THR = (u8)ch; //发送数据
return ch;
}
//定义一个256字节的缓冲区用于存放接收到的串口数据信息
//定义一个16位数据同时保存接收数据长度以及接收数据的状态
u8 serialBuffer[256] = {0};
u16 serialStatus = 0;
//16字节的状态
//低八位为当前存储的有效数据长度
//15位为接收完成等待处理标志
//8位表示当前已经接受到回车符\r
//第9到十四位表示在等待处理期间系统冗余发送的数据量
//用于后期通讯系统的负载自适应
void TransSerialsCommand(u8 res)
{
u8 lostCount;
u8 receiveCount;
//接收数据处理
if(serialStatus & (1<<15))//已经接收完成,这个数据被抛弃
{
lostCount = ((u8)(serialStatus>>9))&0x3f;//漏掉的数据计数
if(lostCount < 0x3f)lostCount++;
serialStatus &= ~(0x3f<<9);
serialStatus |= (lostCount<<9);
}
else//上一个命令没有接收完
{
if(serialStatus & (1<<8))//接收到\r
{
//等待接收\N
if(res == ‘\n‘)
{
//接收完成
serialStatus |= 0x8000;
}
else//不是\n,这一次命令作废
{
serialStatus = 0;
}
}
else//没收到\r
{
if(res == ‘\r‘)
{
serialStatus |= 0x0100;
}
else
{
receiveCount = (u8)(serialStatus&0xff);
if(receiveCount < 255)
{
serialBuffer[receiveCount] = res;
receiveCount++;
serialStatus &= 0xff00;
serialStatus |= receiveCount;
}
else
{
//数据溢出,清空
serialStatus = 0;
}
}
}
}
}
void UART0_IRQHandler(void)
{
u8 status = 0;
u8 res = 0;
//清除串口中断挂起
NVIC_ClearPendingIRQ(GPIO_IRQn);
//清除串口接收中断
if(!(LPC_UART0->IIR & 0x01))//确认有中断发生
{
status = LPC_UART0->IIR & 0x0e;
if(status == 0x04)//确认是RDA中断
{
//读取串口接收值
res = (LPC_UART0->RBR&0xff);
//处理串口接收值
TransSerialsCommand(res);
}
}
}
void Debug_Serial_Init(u32 baud)
{
LPC_SC->PCONP |= (1<<3)|(1<<15); //打开时钟
//配置io口
LPC_IOCON->P0_2 = 0x00; //选择TXD功能,禁止迟滞 不反向 正常推挽
LPC_IOCON->P0_2 |= (1<<0)|(2<<3); //上拉
LPC_IOCON->P0_3 = 0x00; //选择RXD功能,禁止迟滞 不反向 正常推挽
LPC_IOCON->P0_3 |= (1<<0)|(2<<3); //上拉
LPC_UART0->LCR = 0x83; //设置串口数据格式,8位字符长度,1个停止位,无校验,使能除数访问
LPC_UART0->DLM = ((ApbClock/16)/baud) / 256; //除数高八位 , 没有小数情况
LPC_UART0->DLL = ((ApbClock/16)/baud) % 256; //除数第八位
LPC_UART0->LCR = 0x03; //禁止访问除数锁存器,锁定波特率
LPC_UART0->FCR = 0x00; //禁止FIFO
LPC_UART0->IER = 0x01; //使能接收中断RDA
NVIC_EnableIRQ(UART0_IRQn); //打开IRQ中断
}
void Debug_Serial_Send_Byte(u8 dat)
{
//当检测到UARTn THR已空时,THRE就会立即被设置。写UnTHR会清零THRE
//0 - UnTHR包含有效字符
//1 - UnTHR为空
while(!((LPC_UART0->LSR) & 0x20)); //等待判断LSR[5](即THRE)是否是1,1时表示THR中为空
LPC_UART0->THR = dat; //发送数据
}
void Debug_Serial_Send_Buffer(u8 length,u8* buffer)
{
u8 i = 0;
for(i = 0; i < length; i++)
{
Debug_Serial_Send_Byte(buffer[i]);
}
printf("\r\n");
}
x
#ifndef __DEBUGSERIAL_H_#define __DEBUGSERIAL_H_#include "sys.h"#include "stdio.h"extern u8 serialBuffer[256];extern u16 serialStatus;void Debug_Serial_Init(u32 baud);void Debug_Serial_Send_Byte(u8 dat);void Debug_Serial_Send_Buffer(u8 length,u8* buffer);#endif #include "debugSerial.h"//加入printf支持#pragma import(__use_no_semihosting) struct __FILE{ int handle; /* Whatever you require here. If the only file you are using is */ /* standard output using printf() for debugging, no file handling */ /* is required. */};FILE __stdout; _sys_exit(int x){ x = x;} int fputc(int ch, FILE *f){ while(!((LPC_UART0->LSR) & 0x20)); //等待判断LSR[5](即THRE)是否是1,1时表示THR中为空 LPC_UART0->THR = (u8)ch; //发送数据 return ch;}//定义一个256字节的缓冲区用于存放接收到的串口数据信息//定义一个16位数据同时保存接收数据长度以及接收数据的状态u8 serialBuffer[256] = {0};u16 serialStatus = 0;//16字节的状态//低八位为当前存储的有效数据长度//15位为接收完成等待处理标志//8位表示当前已经接受到回车符\r//第9到十四位表示在等待处理期间系统冗余发送的数据量//用于后期通讯系统的负载自适应 void TransSerialsCommand(u8 res){ u8 lostCount; u8 receiveCount; //接收数据处理 if(serialStatus & (1<<15))//已经接收完成,这个数据被抛弃 { lostCount = ((u8)(serialStatus>>9))&0x3f;//漏掉的数据计数 if(lostCount < 0x3f)lostCount++; serialStatus &= ~(0x3f<<9); serialStatus |= (lostCount<<9); } else//上一个命令没有接收完 { if(serialStatus & (1<<8))//接收到\r { //等待接收\N if(res == ‘\n‘) { //接收完成 serialStatus |= 0x8000; } else//不是\n,这一次命令作废 { serialStatus = 0; } } else//没收到\r { if(res == ‘\r‘) { serialStatus |= 0x0100; } else { receiveCount = (u8)(serialStatus&0xff); if(receiveCount < 255) { serialBuffer[receiveCount] = res; receiveCount++; serialStatus &= 0xff00; serialStatus |= receiveCount; } else { //数据溢出,清空 serialStatus = 0; } } } }}void UART0_IRQHandler(void){ u8 status = 0; u8 res = 0; //清除串口中断挂起 NVIC_ClearPendingIRQ(GPIO_IRQn); //清除串口接收中断 if(!(LPC_UART0->IIR & 0x01))//确认有中断发生 { status = LPC_UART0->IIR & 0x0e; if(status == 0x04)//确认是RDA中断 { //读取串口接收值 res = (LPC_UART0->RBR&0xff); //处理串口接收值 TransSerialsCommand(res); } }}void Debug_Serial_Init(u32 baud){ LPC_SC->PCONP |= (1<<3)|(1<<15); //打开时钟 //配置io口 LPC_IOCON->P0_2 = 0x00; //选择TXD功能,禁止迟滞 不反向 正常推挽 LPC_IOCON->P0_2 |= (1<<0)|(2<<3); //上拉 LPC_IOCON->P0_3 = 0x00; //选择RXD功能,禁止迟滞 不反向 正常推挽 LPC_IOCON->P0_3 |= (1<<0)|(2<<3); //上拉 LPC_UART0->LCR = 0x83; //设置串口数据格式,8位字符长度,1个停止位,无校验,使能除数访问 LPC_UART0->DLM = ((ApbClock/16)/baud) / 256; //除数高八位 , 没有小数情况 LPC_UART0->DLL = ((ApbClock/16)/baud) % 256; //除数第八位 LPC_UART0->LCR = 0x03; //禁止访问除数锁存器,锁定波特率 LPC_UART0->FCR = 0x00; //禁止FIFO LPC_UART0->IER = 0x01; //使能接收中断RDA NVIC_EnableIRQ(UART0_IRQn); //打开IRQ中断}void Debug_Serial_Send_Byte(u8 dat){ //当检测到UARTn THR已空时,THRE就会立即被设置。写UnTHR会清零THRE //0 - UnTHR包含有效字符 //1 - UnTHR为空 while(!((LPC_UART0->LSR) & 0x20)); //等待判断LSR[5](即THRE)是否是1,1时表示THR中为空 LPC_UART0->THR = dat; //发送数据}void Debug_Serial_Send_Buffer(u8 length,u8* buffer){ u8 i = 0; for(i = 0; i < length; i++) { Debug_Serial_Send_Byte(buffer[i]); } printf("\r\n");}原文:https://www.cnblogs.com/bog-box/p/LPC1788-UART.html