前言:无约束优化问题是实际问题中会碰到的问题。在解决约束优化问题的过程中会用到无约束优化问题的解法或思想。古典极值理论中,令一阶导为 0 ,要求二阶可微,然后判断海塞矩阵为正定才能求极小点,有理论意义而没有使用价值,实际中的多元函数很多不可微或不可求二阶导。但古典极值理论是无约束优化方法发展的基础。
\[ min\ f(x)\quad x\in R^n \]
目前已研究出很多无约束优化方法,它们的主要不同点在于构造搜索方向上的差别。
解析法
直接应用目标函数极值条件来确定极值点。把求解目标函数极值的问题变成求解 \(\bigtriangledown f(x)=0\),一般求解比较困难,需要采用数值方法求解。与其用数值方法求解这个非线性方程组,还不如直接用数值法求解无约束极值问题。
数值法
数值法采用数学规划的思想,从起始点 \(x_k\) 开始沿搜索方向 \(d^0\) 进行搜索,确定最优步长 \(\alpha_k\) 使得函数值沿搜索方向下降最大。形成迭代的下降算法
\[
x^{k+1}=x^k+\alpha_kd^k
\]
其中 \(d^k\) 是第 \(k+1\) 次搜索或迭代方向,称为搜索方向 (迭代方向)。
各种无约束优化方法的主要区别就在于确定搜索方向的方法不同。搜索方向的构成问题是无约束优化方法的关键。
根据构成搜索方向 \(d^k\) 所使用的信息性质,分为
| 方法名称 | 迭代公式 |
|---|---|
| 一般迭代式 | \[x^{k+1}=x^k+\alpha_kd^k\] |
| 最速下降法 | \[x^{k+1}=x^k-\alpha_k\bigtriangledown f(x_k)\] |
| 牛顿法 | \[x^{k+1}=x^k-[\bigtriangledown ^2f(x_k)]^{-1}\bigtriangledown f(x_k)\] |
| 阻尼牛顿法 | \[x^{k+1}=x^k-\alpha_k[\bigtriangledown ^2f(x_k)]^{-1}\bigtriangledown f(x_k)\] |
最速下降法是一个古老的求解极值的方法,于 \(1847\) 年由柯西提出。
主要就是取负梯度方向为搜索方向。所以最速下降法又称 “梯度法”。
迭代算法为:
初始点 \(x^0\),\(k=0\),迭代阈值 \(\varepsilon\)
求 \(\bigtriangledown f(x^k)\),如果 \(||\bigtriangledown f(x^k)||\le \varepsilon\),输出 \(x^k\) 为最小值点,算法结束。否则继续。
确定搜索方向 \(d_k=-\bigtriangledown f(x^k)\)
确定一维搜索的最佳步长 \(\alpha_k\)
\[
f(x^{k+1})=f[x^k-\alpha_k\bigtriangledown f(x^k)]=\min\limits _a f[x^k-\alpha\bigtriangledown f(x^k)]=\min\limits _a \phi(\alpha)
\]
\[ \phi'(\alpha)=-\{\bigtriangledown f[x^k-\alpha_k\bigtriangledown f(x^k)]\}^T\bigtriangledown f(x^k)=0\\ \Rightarrow [\bigtriangledown f(x^{k+1})]^T\bigtriangledown f(x^k)=0 \]
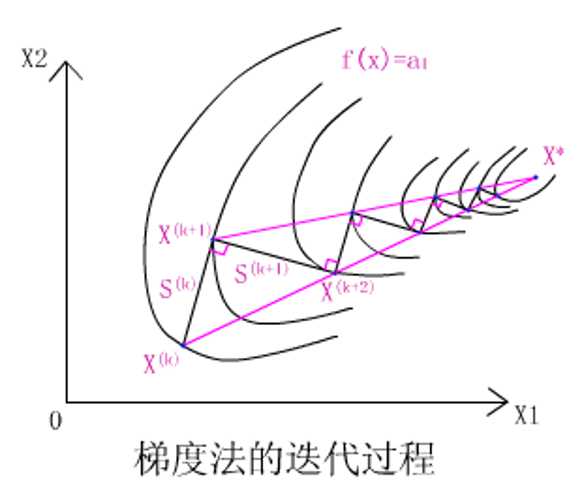
即相邻两迭代点上的函数梯度相互垂直,即相邻两个搜索方向互相垂直。
搜索路线呈“之”字锯齿形。
在接近极小点的位置,由于“之”字路线使得每次迭代行进的距离缩短,收敛速度减慢。主要是因为梯度是函数的局部性质,从整体看还是走了弯路,函数下降并不如人意。
小结:
最速下降法可以使目标函数在头几步下降特别快,所以可以与其他无约束优化方法配合使用。先最速下降求得较优初始点,再用其他收敛快的方法继续寻找极小点。
基本思想:用二次函数近似原目标函数,使用二次函数的极小点作为下一个迭代点。
泰勒展开:
\[
f(x)\approx \phi(x)=f(x^k)+\bigtriangledown f(x^k)^T(x-x^k)+\frac{1}{2}(x-x^k)^T\bigtriangledown^2 f(x^k)(x-x^k)
\]
设 \(x^{k+1}\) 为 \(\phi(x)\) 极小点,则 \(\bigtriangledown \phi(x^{k+1})=0\)
\[
\bigtriangledown f(x^k)+\bigtriangledown^2 f(x^k)(x^{k+1}-x^k)=0\\\Rightarrow x^{k+1}=x^k-[\bigtriangledown^2 f(x^k)]^{-1}\bigtriangledown f(x^k)
\]
牛顿法能使二次型函数在有限次迭代内达到极小点,是二次收敛的。(对于二次函数,展开到二次项的泰勒展开式就是其本身,海塞矩阵是一个常数阵,一步找到极小点)
牛顿法纯粹基于极值的计算来确定极值点,没有包含下降方向搜索的思想,所以对于非二次函数,有时迭代后反而使函数值上升。
把 \(d^k=-[\bigtriangledown^2 f(x^k)]^{-1}\bigtriangledown f(x^k)\) 看作一个搜索方向,并称为 “牛顿方向”,再引入搜索方向里 “步长的” 概念。
\[
f(x^{k+1})=f(x^k+\alpha_kd^k)=\min\limits_\alpha f(x^k+\alpha_kd^k)
\]
阻尼牛顿法每次都在牛顿方向上一维搜索,避免了迭代后数值上升的现象,又保留了牛顿法二次收敛的特性。
但是牛顿型方法每次都要计算海塞矩阵,再对海塞矩阵求逆,计算量巨大。条件苛刻,二次不可微的 \(f(x)\) 也不适用,若海塞矩阵是奇异矩阵不能求逆矩阵,也进行不下去,为了保证牛顿方向是下降方向,海塞矩阵的逆矩阵还必须正定。
原文:https://www.cnblogs.com/ColleenHe/p/11782538.html