时间回到十年前,如果有人向你提到无人驾驶汽车,大概率你会感到陌生,认为那只是科幻小说描绘的未来元素,或者还能勾起你对电影疯狂的石头里那个经典的场景的回忆,“狗日滴,高科技啦,无人驾驶。”

无人驾驶并不是一个新概念,在汽车发明后的时间里,工程师们从来都未停止过对无人驾驶技术路线的探索和研究。之所以最近突然变得炙手可热,这主要得益于人工智能技术的巨大突破,使得作为人工智能重要应用场景的无人驾驶获得了飞速的发展,现在已经能够实现低级别或有限场景下的无人驾驶。
如今你可能不会质疑无人驾驶这一技术是否合理,你质疑的是这一技术什么时候能够真正的落地?能否在自己的有生之年享受到这一激动人心的科技。未来的精彩值得我们耐心的期待,现在让我们先回到现实中来,回顾下无人驾驶的发展历史。
1910年代——“战争狗”
早期的无人车辆主要通过无线电技术实现,根据“Unmanned Systems of World Wars I and II”的作者埃弗里特(HR Everett)的说法,第一辆无人地面车辆是西班牙发明家莱昂纳多·托雷斯·奎韦多(Leonardo Torres-Quevedo)于1904年制造的无线电遥控三轮车。在第一次世界大战期间,军队使用了各种小型,无线电控制的车辆来运送和引爆火药。
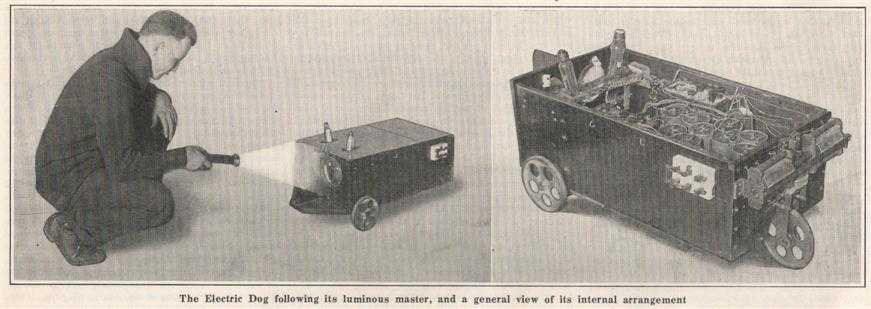
根据1919年《科学美国人》记录,大约在1912年,美国无线电控制设备专家小约翰·哈蒙德(John Hammond Jr.)和本杰明·密斯纳(Benjamin Miessner)利用一个电子回路和一对光感性硒光电管设计了一款简单的自动引导小车,并给它起了一个凶悍的名字——“战争狗”。
战争狗的设计原理很简单,左右光感电管感知环境的光强差异,电子回路构成的底层控制系统根据光强信号控制小车转向,如果两侧感光存在差异,小车将向光强一侧转向;如果两侧感光均衡,小车保持直行。现在请脑部一下这样的画面:夜晚,背着火药的战争狗蛰伏在靠近敌人防线的地方,突然敌人打开了探照灯,战争狗迅速调整方向朝探照灯移动过去,将火药顺利送进了毫无戒备的守夜士兵那里。
战争狗的机械设计相对比较粗糙,但却给后续无人驾驶提供了思路,我们现在车上使用的定速巡航从本质上也和战争狗有相同的逻辑,在车速较低时,自动注入较多汽油提升车速,如果车速过快,控制器会减少汽油的注入,直到预定速度和实际速度之间的差异为零。
1920年代——无线电控制汽车
当时,无人驾驶汽车是一种新颖的测试和演示无线电控制系统的准确性的方法。无线电在长距离传输信号方面存在优势,这使得早期的工程师萌生了遥控汽车的想法,但同时无线电信号容易受到干扰,经常会把无线电波放送到其他的接收器上,所以无线电控制汽车都有一个操作员,操作员跟随汽车发送操纵指令,同时实时监控和处置汽车可能遇到的情况。下面为两辆有记录的无线电遥控汽车的故事。
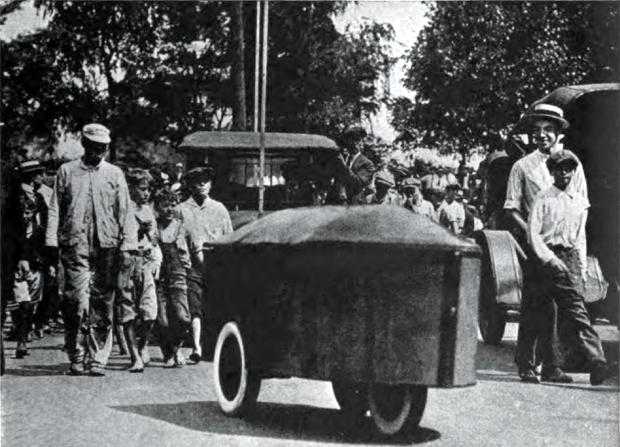
1921年美国军方的Raymond E. Vaugha在俄亥俄州代顿市的街道上展示了一辆无线电遥控的汽车。尽管该车只有三个轮子,外形酷似一个棺材,但还是吸引了不少当地市民的注意,一家名为《电气世界》(Electrical World)的出版物报道了当时的情景:“成百上千的人……惊叹不已”,看着无人驾驶的“汽车”跟着它的驾驶员走。文章指出:“当汽车驶近街道十字路口时,观察到交通信号,如果有行人或其他障碍物驶入,喇叭就会吹响。”
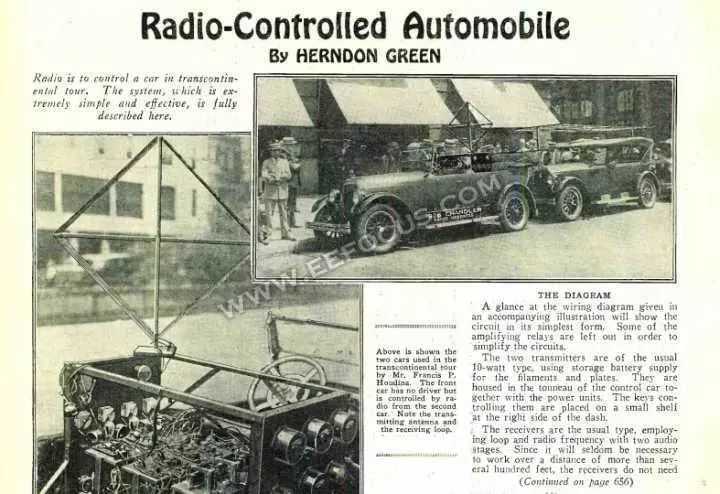
1925年,Houdina无线电控制公司的创始人前美国陆军前工程师Francis P. Houdina发明了一种无线电操纵的汽车。这辆车由一辆1926 Chandler改装而成,车辆的后座上安装了无线电接收天线,并配置了一系列小型电动机执行对汽车的控制,Houdina坐在后方的另一辆装有发射器的汽车上发射无线电信号,前方车辆接受信号并生成指令,电动机根据相应指令控制车辆启动、转向、刹车、加速器、按喇叭等。Houdina将他发明的汽车命名为“美国奇迹”(American Wonder),他在纽约繁忙的街道上公开展示了他的无线遥控无人驾驶汽车,当天碰巧赶上一个示威游行,他操纵汽车穿越拥挤的交通,从百老汇开到了第五大道,引起了巨大的轰动。纽约时报对此事进行了报道,更增加了知名度,Houdina和他的American Wonder一时间成了明星,经常受邀在全美的城市街道进行展示,参加商业活动和汽车公司的宣传活动。
尽管Houdina的无线电遥控汽车并不是真正的自动驾驶,但他的” 美国奇迹”给公众留下了深刻的印象,使无人驾驶汽车的魅力日益浓厚。一定程度推动了无人驾驶汽车的发展。
1930年代——世界博览会上的畅想
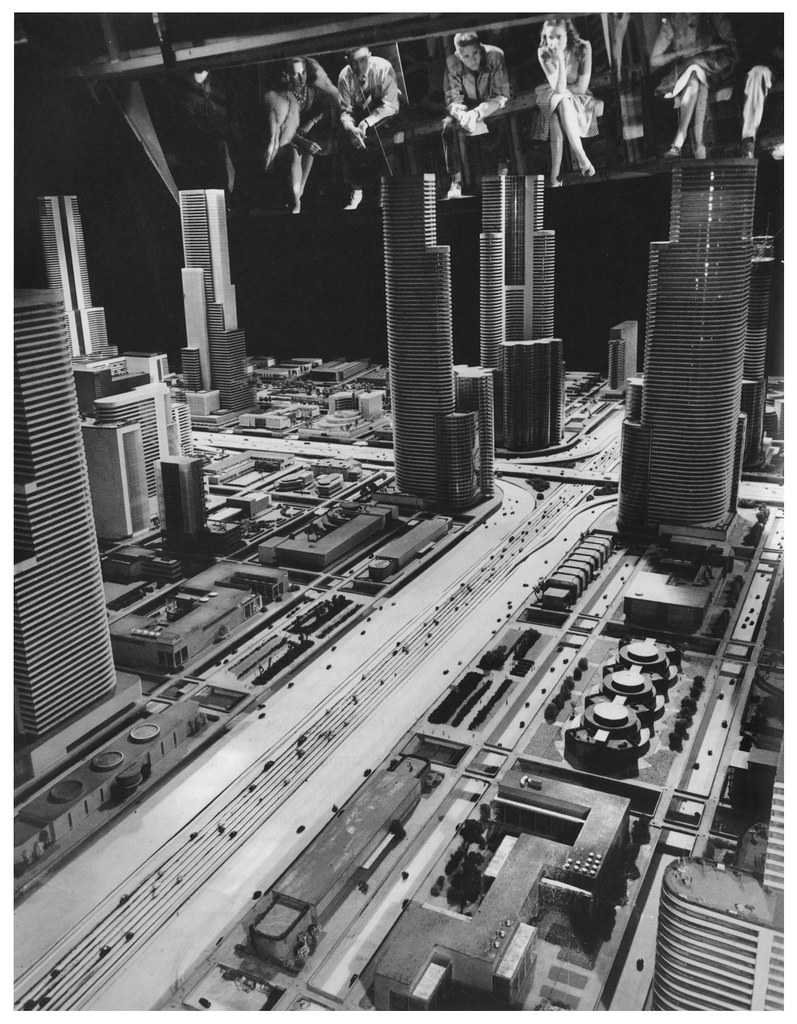
1939年,通用汽车公司在纽约世界博览会上向数百万参观者展示一个名为“Futurama”(未来世界)的作品,工业设计师 Norman Bel Geddes向当时的人们展示了他对未来汽车及交通的想法——自动化高速公路,即未来的汽车采用无线电控制,使用电力驱动,带有集成电缆的“专用”高速公路提供了电磁场,可以传输动力来推动汽车行驶。后来由于美国参加第二次世界大战,通用汽车也随之将自己的精力从自动化高速公路项目转到了为同盟国制造坦克、飞机以及其他武器。自动化高速公路项目在20世纪40年代几近终止。
1950年代——“电子化高速公路”
时间来到50年代,伴随着二战后的经济繁荣,多数美国家庭都购买了汽车,但是人们在享受汽车带来的出行便利和私密旅行时,其实并不想承担驾驶任务,自动化高速公路的设想在公众的观念里依然流行。当时美国电气照明与动力公司的一个平面广告生动的展现了人们无人驾驶汽车的设想:一家人面对面坐在车后座上,围着一个桌子玩多米诺骨牌游戏。搭配的文字说明如下:有一天,你的爱车会疾驰在一条电子化超级高速公路上,它的加速和转向全都由嵌入公路里的电子设备自动控制。高速公路将会变得安全可靠:没有拥堵、没有碰撞、没有疲劳驾驶。

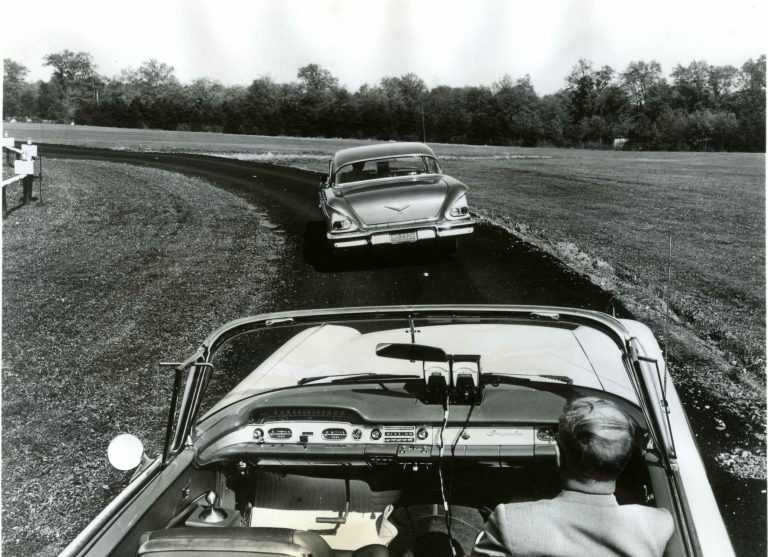
通用汽车在世界博览会上成功地展出“未来世界”让人们神魂颠倒之后,十多年时间过去了依然未能梦想成真,通用汽车仍在为建造自动化的高速公路而努力。美国无线电公司(Radio Corporation of American, RCA)是20世纪50年代电子工业创新的发源地,通用汽车公司与之合作研发高速公路。经过几年的努力,两组团队设计出来一个他们称之为电子化高速公路的创意解决方案,他们结合了无线电技术、电子电路以及基于历史悠久的电磁学理论而创建的逻辑门电路。1958年,通用汽车公司和美国无线电公司(RCA)的研究团队合作组装出一套车辆侦测与引导系统,在内布拉斯加州林肯市郊区一条长400英尺、专门改造过的高速公路上,利用两辆1958年款雪佛兰进行了测试。测试车辆基于侦测与引导系统实现了前后车距保持以及自动转向的功能。
车辆侦测与引导系统是各种复杂电子设备的综合。这个系统必须实现基础设施之间的信息通信,这涉及晶体管、无线电发射器等。为了创建这一侦测系统,美国无线电公司的工程师首先在道路中铺设一系列矩形电线回路,这些矩形回路的长度比汽车车长略短,一个个矩形回路之间首尾相接,覆盖整条测试道路。
每当车辆行驶经过一个矩形回路,就会向埋在道路中的晶体管侦测设备发送一个特殊的信号。当车辆快速驶过这一系列矩形回路时,反馈信号就会流入由所有侦测器组成的一个网络里,这些信号就会以无线电的形式传播给附近的控制塔,然后由控制塔自动地以无线电指令的方式传递给附近的车辆,附近车辆就会自动执行刹车或加速来调整与这辆车之间的距离,这样就实现了道路上前后车距的保持功能。
测试车辆前端配备有两个等距分置的金属“传感线圈”,与每个传感器线圈匹配的是一套测量设备,用于测量其中通过的电流强度。当汽车从道路上方驶过时,埋在地下的矩形回路会产生磁场,而这个磁场又会引发车载传感线圈产生电流。如果车辆正确地行驶在道路中央,两个传感线圈中产生的电流将会大致相当。然而当汽车危险地偏向了道路的一侧,这侧的传感线圈就会产生更强的电流,对应的传感器也会记录下相较于另一侧较高的数值,接收到较强信号的传感器就会向汽车的方向盘操控系统发送指令,要求车辆轻微转向,直到两侧的传感器测量数值再次平衡。这就是测试车辆实现自动调整方向的原理,其准确性和反映速度丝毫不逊于一个注意力集中的人类驾驶员。
当时,对于通用汽车和美国无线电公司的这套自动驾驶系统,人们的乐观情绪高涨。普林斯顿市镇府甚至发表了一篇通讯稿,热情豪迈的认为在未来的某一天,这套电子化高速公路的发明将使得"未来的出行者可以在周末出游时坐在车中打桥牌或睡一觉"。
然而除去公众的热情反馈,通用汽车的电子化高速公路方案在50年代并没有实施起来。
1960、70年代——新希望的出现
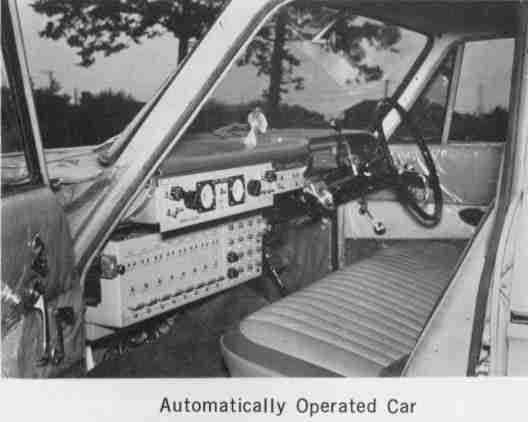
1960年,利用同样的方式,通用汽车又在新泽西洲建立了另一条电子化高速公路的测试跑道,但这次是为通用汽车专门定制的,最终实现了车辆的自动启动、加速、转向与停止,全程没有人工直接参与。
1964年通用汽车公司在纽约世界博览会上再此向公众展示了无人驾驶汽车的梦想,而那里正是25年前1939年“未来世界”大放光彩的地方。通用汽车再广告中这样宣传他们的概念车“火鸟”:“某一天,一家人驾车行驶再超级公路上时,可以将车辆交给一套自动程序化的引导系统,人们随后就能尽情的享受旅程的舒适和绝对的安全,并以今天高速公路上汽车两倍速度前往目的地。” 尽管火鸟有着吸引人的柔美线条和单峰垂直尾翼,它还是成为了通用汽车在自动化高速公路领域投入几十年后的绝唱。如今,世博会已经过去了快60年,通用汽车还在为无人驾驶的梦想努力,只不过早已不是自动化高速公路的方案。
纵观20世纪六七十年代,利用通用汽车和美国无线电公司的基础系统——电缆、金属传感器和磁场感应器的组合,其他研究者继续针对自动化高速公路做了些改进升级。20世纪60年代,美国俄亥俄州成了汽车工程领域的前沿研发中心,在当时尤其以自动化车辆引导和控制的研究为人所熟知。同一时期,英国运输与道路研究实验室(Transport and Road Research Laboratory)使用改装的Citroen DS采用相同的方法,以130Km/h的速度在各种天气状况下进行了试验,结果汽车的速度和方向都没有发生偏离。同时根据分析,采用这个系统后,道路的负载能力将提高50%,而交通事故将减少40%。不过在70年代中期,由于研究资金撤出,试验被迫中断。

70年代以后自动化高速公路的研究逐渐停止了,自动化高速公路的美梦破灭的主要原因之一就是——成本,安装必备的电缆和路边控制系统是一项耗资巨大却又见效缓慢的工程,装配一条短小的测试跑道所需的成本还算合理,但是对于美国或欧洲那些横跨各州的浩大公路网而言,方案就显得不切实际了。此外,由于70年代爆发的石油危机和汽车安全事故的问题,汽车油耗和安全等成了各汽车公司急需解决的问题,汽车厂商逐渐放弃了对自动化高速公路的研究。
虽然通用汽车和美国无线电公司合作的研究成果虽然最终未能用于无人驾驶,但是电子化高速公路方案中车辆侦测系统的核心理念今天仍然广泛应用于反馈式信号灯的制造。自动化信号灯之所以能调控车流,关键就在于它能侦测出路口是否有汽车出现,或者有车辆等待左转。当侦测道车辆时,由埋地线路和传感器组成的一套回路系统就会发送电子信号,让信号灯由红变绿。
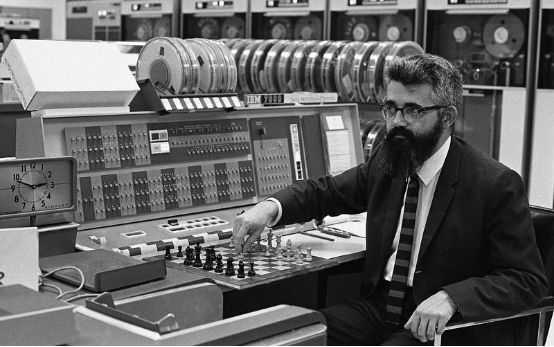
1966年到1972年间,美国斯坦福国际研究所(SRI)成功研制了世界上第一个真正可移动和感知的机器人Shakey。研究人员为Shakey装备了电视摄像机、三角法测距仪、碰撞传感器、驱动电机以及编码器,并通过无线通讯系统由二台计算机控制。Shakey具备一定人工智能,能够自主进行感知、环境建模、行为规划和控制,这也成了后来机器人和无人驾驶的通用框架。

1969年,人工智能的创始人之一的约翰麦卡锡在一篇名为“电脑控制汽车”的文章中描述了与现代自动驾驶汽车类似的想法。麦卡锡所提出的想法是关于一名“自动司机”可以通过“电视摄像机输入数据,并使用与人类司机相同的视觉输入”来帮助车辆进行道路导航。他在文章中写道,用户应该可以通过使用键盘输入目的地来驱使汽车能够立即自动前往目的地。同时也会存在额外的命令可以让用户改变目的地,例如在休息室或餐厅停留,可以放慢速度或者在紧急情况下加速。虽然没有这样的车辆存在,但麦卡锡的文章为其他研究人员的任务设计提供了帮助。麦卡锡讲述了该想法的两个好处:驾驶方便和驾驶安全。他的这篇前瞻性文章,启发了八十年代的大部分研究。
1977年,日本筑波工程研究实验室的S.Tsugawa和他的同事们开发出了第一个基于摄像头来检测导航信息的自动驾驶汽车。这辆车内配备了两个摄像头,并用模拟计算机技术进行信号处理。时速能达到30公里,但需要高架轨道的辅助。这是所知最早的开始使用视觉设备进行无人驾驶的尝试,由此翻开了无人驾驶新的一页。
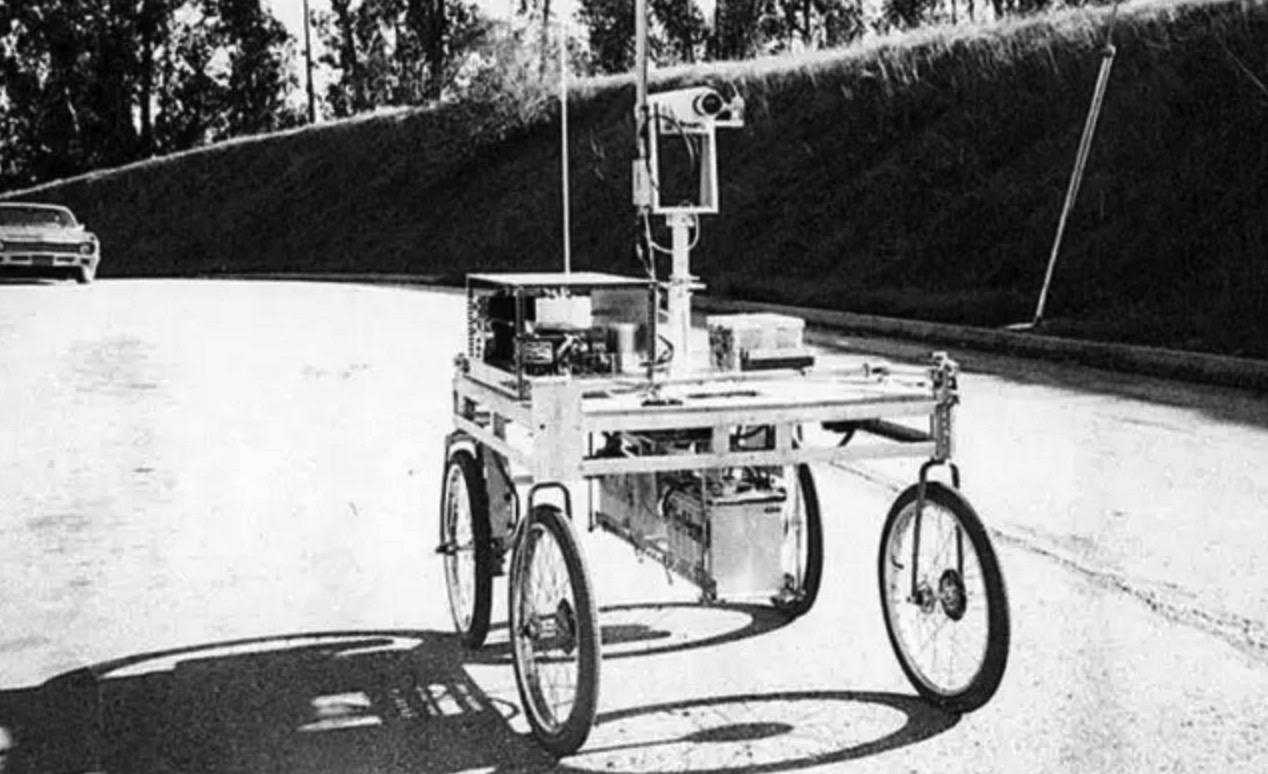
1961年斯坦福大学的博士候选人詹姆斯·亚当斯制造了一个原型车,这辆车后来被称为斯坦福推车,用于测试火星探测车的可行性。他的试验失败了,因为测试车的延迟竟然达到了2.5秒。后来的研究者在斯坦福推车的基础上不断的进行了改进,1967年推车能够跟随白线行驶。1977 年,还在斯坦福大学人工智能实验室(Stanford AI Laboratory)读博士的汉斯·摩拉维克(Hans Moravec)为斯坦福推车研制了一台配备立体视觉和电脑远程控制系统,电视摄像机安装在车顶栏杆上,从几个不同的角度拍摄照片,并将其传送到电脑,电脑计算小车和它周围的障碍物之间的距离,并操纵小车绕过障碍物。1979年,推车在没有人干预的情况下,花了大约5个小时成功地穿过了一个放满椅子的房间。斯坦福推车相当于早期无人驾驶汽车。
原文:https://www.cnblogs.com/yfinn/p/12064044.html