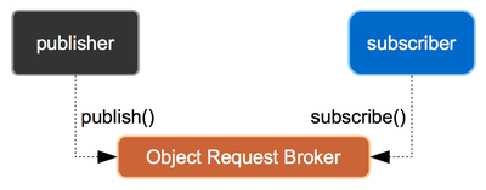
uORB(Micro Object Request Broker,微对象请求代理器)是PX4/Pixhawk系统中非常重要且关键的一个模块,它肩负了整个系统的数据传输任务,所有的传感器数据、GPS、PPM信号等都要从芯片获取后通过uORB进行传输到各个模块进行计算处理。实际上uORB是一套跨「进程」 的IPC通讯模块。在Pixhawk中, 所有的功能被独立以进程模块为单位进行实现并工作。而进程间的数据交互就由为重要,必须要能够符合实时、有序的特点。在PX4中,uorb是用于无人机模块间通信的协议机制。
首先,我们可以将uorb的通信机制了解一下。它的设计理念很有趣,它可以实现不同模块中的数据快速通讯,并且以异步通讯为基本原则,也就是说在通讯过程中发送者只负责发送数据,而并不关心数据由谁接收,也不关心接收者是否能将所有的数据都接收到;而对于接收者来说并不关心数据是由谁发送的,也不关心在接收过程中是否将所有数据都接收到。
uORB在在数据发布与接收过程中并不保证发送者的所有数据都可以被接收者收到,而只保证接收者在想要接收时能收到最新的数据。而发送与接收的分离可以使飞程中各个模块相互独立,互不干扰。实际上一个uORB可以由多个发送者发布,也可以被多个接收者接收,也就是说他们之间是多对多的关系。发布者以一定频率更新发布数据到uorb平台上,不关心谁来接收。订阅者可以随时来获取数据。
通俗例子:
有一个教室编号208,里面的黑板上可以写上一些文字内容,有一个同学名叫小强,他每隔1个小时就会来到208教室,先将黑板上原来的文字擦除,然后在黑板上写下一段新文字,之后离开208教室。而另外有一个同学叫小朋,他每隔3个小时就会来到208教室,将黑板上的文字抄写到自己的笔记本上,然后离开。我们可以用下列图例来说明一下这个过程:
我们可以看到,小强每次发布数据之后就会离开208教室,至于有没有人或是谁来读取他留下的文字,小强自己并不关心,也不再乎自己发布的数据是否有人收到了。而对于小朋来说,他每隔3小时来读取一次数据,至于这些数据是谁发布的他也不关心。他每隔3小时来读黑板上的文字时,其实小强已经在黑板上留言3次了,前两次的文字已经被小强擦除了,小朋看到的永远是小强留下最新的内容。
原文:https://www.cnblogs.com/kinson/p/12108591.html