1. 背景
最近被 旋转矩阵、 欧拉角、 四元数 的转换搞的头大,所以梳理一下。转换程序主要参考某个神奇的网页[1]。这个神奇的网页有所有的相互转换,在这里只记录我用到的。
2. 旋转矩阵和四元数
旋转矩阵和四元数都能唯一确定一次旋转,所以旋转矩阵和四元数直接的转换是唯一的,不需要考虑多种情况。
旋转矩阵转四元数:
float tr = m00 + m11 + m22 if (tr > 0) { float S = sqrt(tr+1.0) * 2; // S=4*qw qw = 0.25 * S; qx = (m21 - m12) / S; qy = (m02 - m20) / S; qz = (m10 - m01) / S; } else if ((m00 > m11)&(m00 > m22)) { float S = sqrt(1.0 + m00 - m11 - m22) * 2; // S=4*qx qw = (m21 - m12) / S; qx = 0.25 * S; qy = (m01 + m10) / S; qz = (m02 + m20) / S; } else if (m11 > m22) { float S = sqrt(1.0 + m11 - m00 - m22) * 2; // S=4*qy qw = (m02 - m20) / S; qx = (m01 + m10) / S; qy = 0.25 * S; qz = (m12 + m21) / S; } else { float S = sqrt(1.0 + m22 - m00 - m11) * 2; // S=4*qz qw = (m10 - m01) / S; qx = (m02 + m20) / S; qy = (m12 + m21) / S; qz = 0.25 * S; }
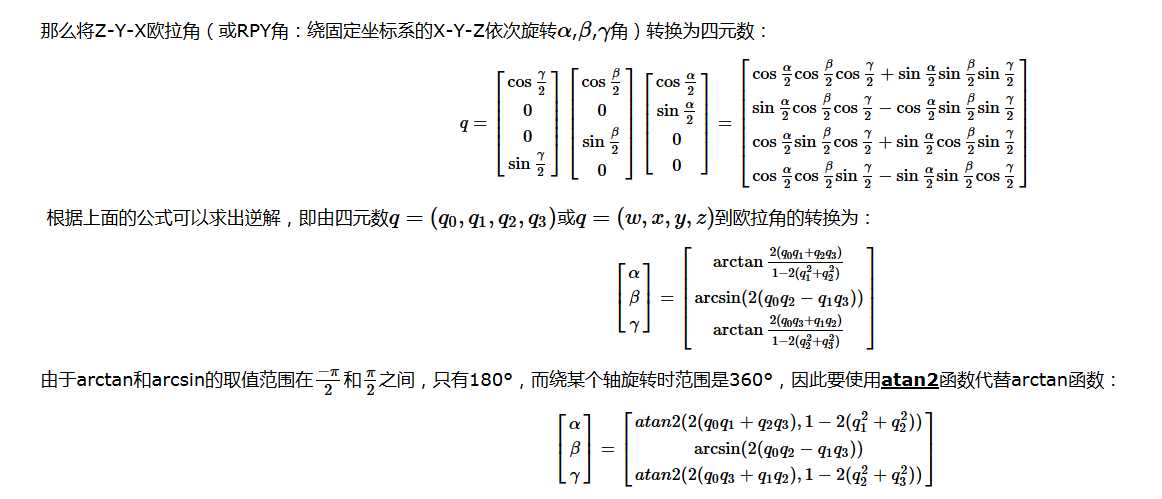
3. 四元数欧拉角
这里就需要考虑顺序了,可以自己计算,也可以参考某些现成的方案[2]。一般常采用的顺序是 Z-Y-X, 我用在Unity,所以也用这个顺序。下图是欧拉角计算四元数的公式,其中第一步为四元数乘法。
4. 参考
[2] Maths - Rotation conversions
原文:https://www.cnblogs.com/xiaochun-zhao/p/12160504.html