摄像头和相机模型和内参原理
相机的工作过程可总结为:
“将三维世界中的坐标点(单位为米)投影到二维图像上(单位为像素)。“我们通常用针孔相机模型来研究这里的投影过程发生了怎样的数值变化。
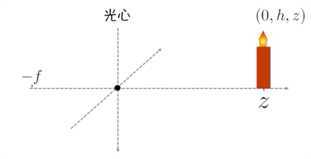
相机会作中心对称处理,相当于我们拿到了相机前方的“虚拟成像”(上图的灰色平面)
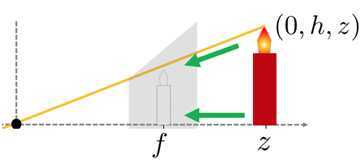
根据相似三角形,有坐标变化:
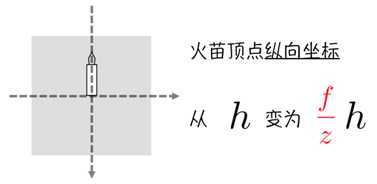
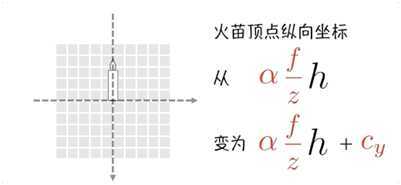
单位是 像素/米
左上角是惯例,还遵循着纵轴向下的另一个惯例
针孔相机模型至此结束

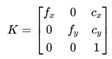
和 
由相机决定的相乘项
,我们记为

别忘了横向也会经历两次缩放!
第1次是一样的
,第二次是 
(但通常= )我们把
)我们把  记为
记为 


原文:https://www.cnblogs.com/wujianming-110117/p/12488799.html