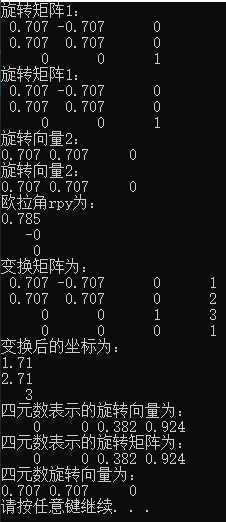
1 Matrix3d R_mat = Matrix3d::Identity();//初始化为单位阵 2 AngleAxisd R_vec(M_PI/4,Vector3d(0,0,1));//用旋转角和旋转轴表示的旋转向量 3 cout.precision(3);//输出精确到三位小数 4 R_mat = R_vec.toRotationMatrix();//旋转向量转化为旋转矩阵 5 cout << "旋转矩阵1:\n"<<R_vec.matrix() << endl //旋转向量转化为旋转矩阵 6 << "旋转矩阵1:\n" << R_mat << endl; 7 8 Vector3d v(1, 0, 0); 9 Vector3d v_r = R_vec * v;//用旋转轴和角表示的坐标变换 10 cout << "旋转向量2:\n" << v_r.transpose() << endl;//transpose()为转置 11 v_r = R_mat * v;//用旋转矩阵表示的坐标变换 12 cout << "旋转向量2:\n" << v_r.transpose() << endl; 13 14 Vector3d eul_ang = R_mat.eulerAngles(2, 1, 0);//ZYX顺序,RPY 15 cout << "欧拉角rpy为:\n" << eul_ang << endl;//绕Z旋转π/4 16 17 Isometry3d T = Isometry3d::Identity();//欧氏变换,4x4矩阵 18 T.rotate(R_vec);//按照R_vec旋转向量来旋转 19 T.pretranslate(Vector3d(1, 2, 3));//平移向量为(1.2.3) 20 cout << "变换矩阵为:\n" <<T.matrix() << endl; 21 22 Vector3d v_transform = T * v;//就是通常的R*v+t,旋转和平移都包括进去了对于坐标第四个数默认补0 23 cout << "变换后的坐标为:\n" << v_transform << endl; 24 25 Quaterniond q = Quaterniond(R_vec);//用四元数表示旋转向量 26 cout << "四元数表示的旋转向量为:\n" << q.coeffs().transpose() << endl;//(i,j,k,w),前三个为虚部,最后一个为实部 27 q = Quaterniond(R_mat);//用四元数表示旋转矩阵 28 cout << "四元数表示的旋转矩阵为:\n" << q.coeffs().transpose() << endl;//(i,j,k,w),前三个为虚部,最后一个为实部 29 30 v_r = q * v;//用四元数表示的旋转变换,数学中是q*v*q.inverse() 31 cout << "四元数旋转向量为:\n" << v_r.transpose() << endl;
原文:https://www.cnblogs.com/fuzhuoxin/p/12619104.html