SLAM(同时定位和地图绘制)是一种通过估计地图在任意空间中的当前位置来绘制地图的技术:它是TurtleBot的前代产品的众所周知的功能。cartographer是google推出的一套基于图优化的SLAM算法。cartographer算法的主要目标是实现低计算资源消耗,达到实时SLAM的目的。本例程以cartographer算法为例作说明。
[TurtleBot3]
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 launch turtlebot3_bringup robot.launch.py
注:指定${TB3_MODEL}:burger,waffle,waffle_pi命令之前。请参考文档“ TurtleBot3 MODEL的相应说明”来设置机器人模型。
[远程PC]
ros2 launch turtlebot3_cartographer cartographer.launch.py
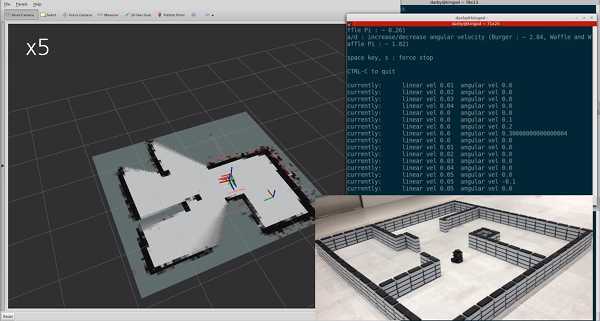
为了实现A映射的高级别准确性,您需要在给定位置手动重复几次SLAM。使用以下程序包(远程操作节点)进行手动操作。
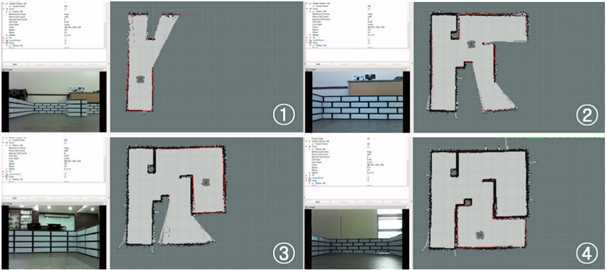
请参阅映射过程的图片,其中显示了机器人如何使用SLAM绘制地图。
[远程PC]
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_teleop teleop_keyboard
使用键盘控制器
Control Your TurtleBot3!
---------------------------
Moving around:
w
a s d
x
w/x : increase/decrease linear velocity
a/d : increase/decrease angular velocity
space key, s : force stop
CTRL-C to quit
原文:https://www.cnblogs.com/kay2018/p/12632162.html