1、L2正则化
2、线性回归的极大后验估计(MAP)
- 假设
- 映射函数为 f(w)=wTx
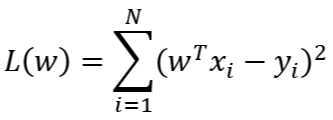
- 真实标签与预测值之间的关系为:y=f(w)+ε=wTx+ε
- 其中 ε~N(0,σ2)
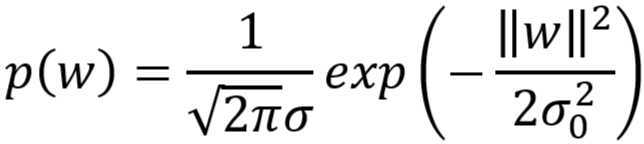
- 权重参数 w~N(0,σ02)
- 后验概率 p(w|y)=p(y|w)p(w)/p(y)
3、如上式推导结果,可得

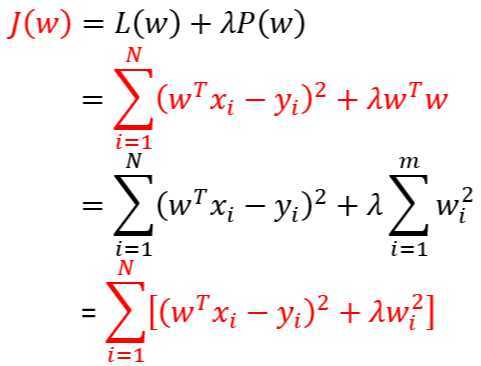
- w 的最小二乘法 MLE 的 L2 正则化后的估计值为

- 由上可知,在对权重参数 w 作概率分布假设 w~N(0,σ02) 的前提下,w 的 MAP 的估计值与 MLE 的 L2 正则化后的估计值形式相同
- 即,MAP 相当于添加了 L2 正则化后的MLE
机器学习系列——线性回归(四)MAP与正则化的关系
原文:https://www.cnblogs.com/snailt/p/12760409.html