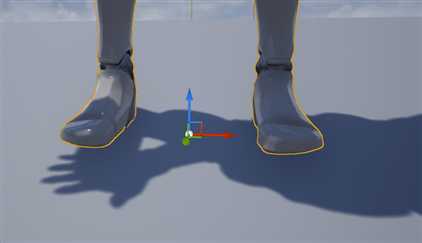
通过射线击中点的法线和Atan2函数计算出脚骨骼的旋转角度,让其贴合斜面。骨骼的旋转基于worldspace叠加计算。

从图可以看出,只要控制脚的X、Y轴向旋转,即可贴合地面;Z轴旋转属于反关节,不符合常识。
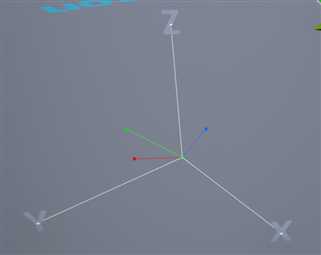
在做旋转的时候,把旋转分成、XY轴向的旋转。红色法线分解成蓝色和绿色的2D向量,分别在XZ平面和YZ平面中。
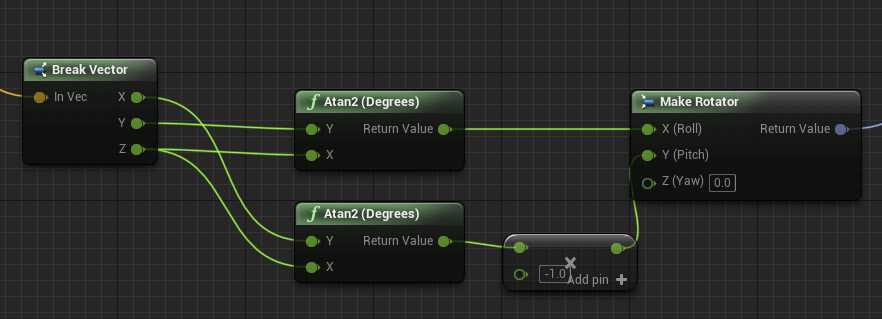
通过斜面法线的Y、Z两轴,在使用Atan2可求出X轴向的旋转;同理使用X、Z两轴求出Y向的旋转,最后传给骨骼Rotation的X、Y即可。
(完)
原文:https://www.cnblogs.com/weixiaodezhoubian/p/12780741.html