
特点:是每一层上的结点数都是 最大结点数
特点:⑴叶子结点只可能在层次最大 的两层出现
⑵对任一结点,若其右 分支下的子孙的最大层次为l,则其左 分支下的子孙的最大层次为l或l+1
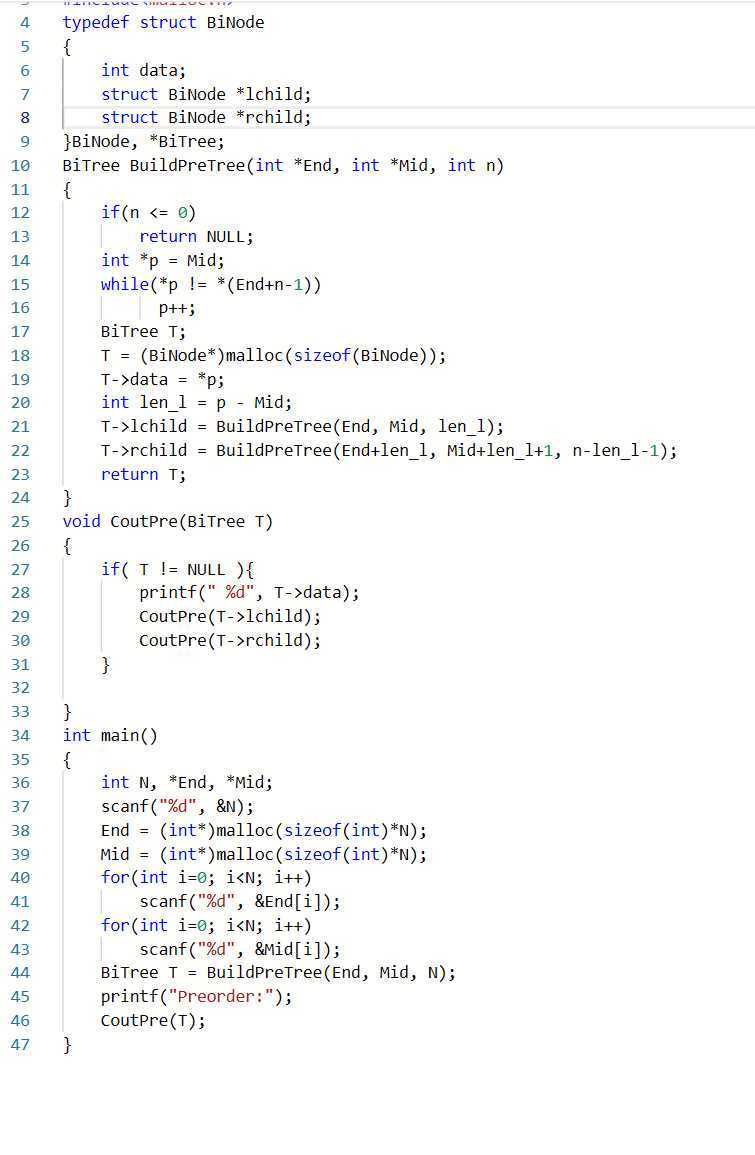
void preorder(BiTree T)
{
if(T){
preorder(T->lchild);
cout<<T->data;
preorder(T->rchild);
}
}
void InOrderTraverse(BiTree T)
{
InitStack(S); p = T;
while (p || !StackEmpty(S)){
if (p){
Push(S, p); p = p->lchild;
}
else{
Pop(S, q);
cout << q->data;
p = q->rchild;
}
}
}
1.叶子节点为n的哈夫曼树共有2n-1个节点
2.哈夫曼树不唯一,但可以找查找长度最短的哈夫曼树
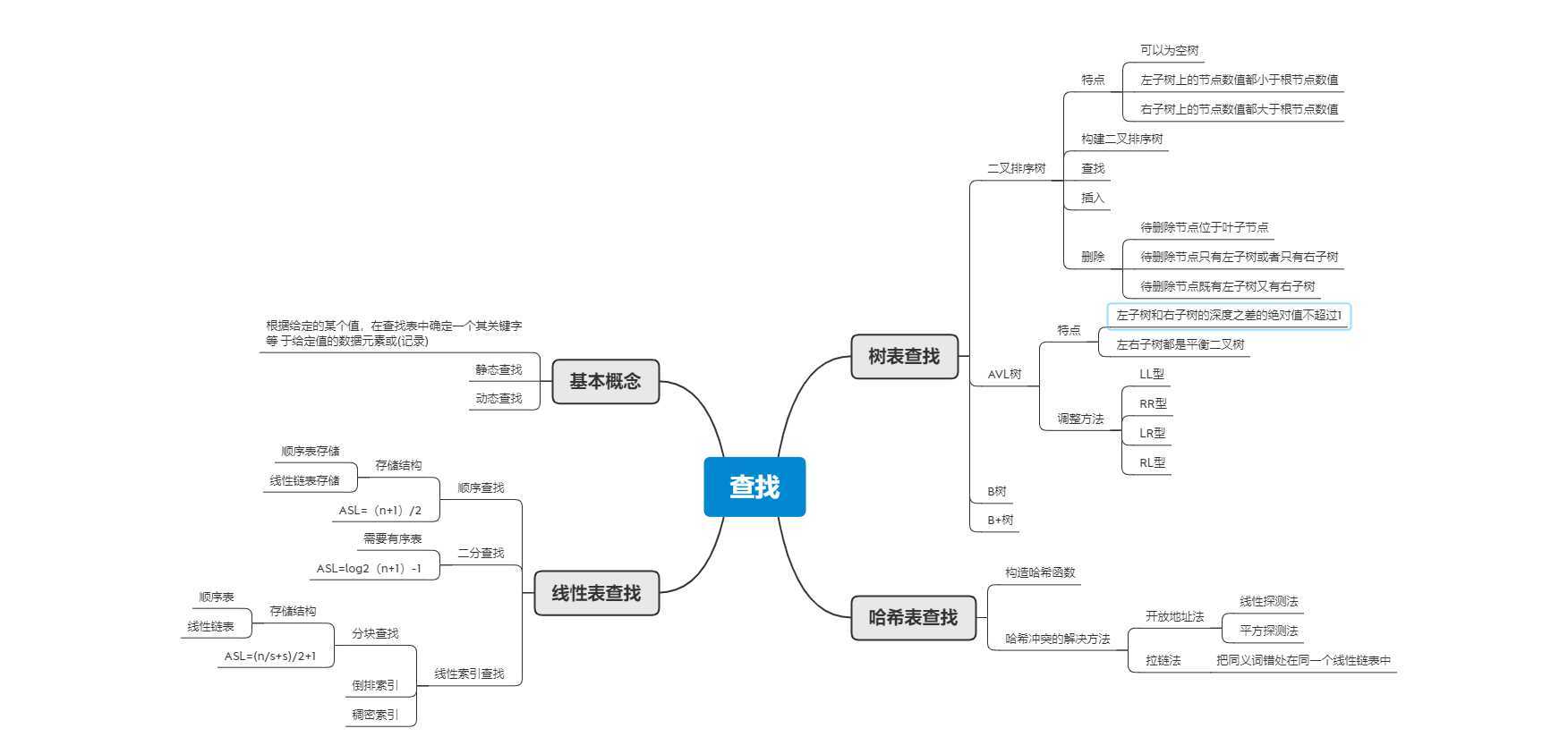
类别:静态查找和动态查找
①静态查找:仅作查询和检索操作的查找表
②动态查找:有时在查询之后,还需要将“查询”结果为“不在 查找表中”的数据元素插入到查找表中 或者,从查找表中删除其“查询”结果为“在查找 表中”的数据元素
①可以为空树
②含有n个结点的二叉排序树的平均查找长度和树的形态有关
③平均查找长度和二叉树的形态有关。
最好:log2n(形态匀称,与二分查找的判定树相似)
最坏: (n+1)/2(单支树)
B树
①m阶B树的非根节点的孩子个数最多有m个,最少有m/2(向上取整)个
②关键字个数最多有m-1个,最少有m/2-1个
B+树
①m阶B+树的每个分支节点至多有m棵子树
②有n棵子树的节点有n个关键字
③叶子节点包含全部关键字及指向相应记录的指针
①哈希表:将一组关键字映像到一个有限的、地址连续的地址 集 (区间) 上,并以关键字在地址集中的“像”作为 相应记录在表中的存储位置,如此构造所得的查找表 称之为“哈希表“
②处理冲突的方法:开放定址,链地址法
链地址法:将所有哈希地址相同的记录都链接在同一链表中
③决定哈希表查找的ASL的因素:
选用的哈希函数
选用的处理冲突的方法
哈希表饱和的程度,装载因子(a=n/m)值的大小(n:记录数,m:表的长度)
通过看课件以及百度查找了解到了
①插入后,该结点的关键字个数n<m,不修改指针;
②插入后,该结点的关键字个数 n=m,则需进行 “结点分裂”,令 s = ?m/2?,在原结点中保留 (A0,K1,…… , Ks-1,As-1);建新结点(As, Ks+1,…… ,Kn,An);将(Ks, p)插入双亲节点
③若双亲为空,则建新的根结点
①直接从最小关键字开始进行顺序查找所有叶节 点链接成的线性链表
②从B+树的根节点出发一直找到叶节点为止
原文:https://www.cnblogs.com/cxdscx/p/12780744.html