该篇文章主要讲解ROBOTIS OP3的Gazebo仿真应用。
如果您安装的ROS版本为ros-kinetic-desktop-full,则您执行以下操作来安装Gazebo:
apt-get install ros-kinetic-ros-control apt-get install ros-kinetic-ros-controllers apt-get install ros-kinetic-gazebo-ros-control
在Gazebo中调用ROBOTIS-OP3的命令
roslaunch op3_gazebo robotis_world.launch
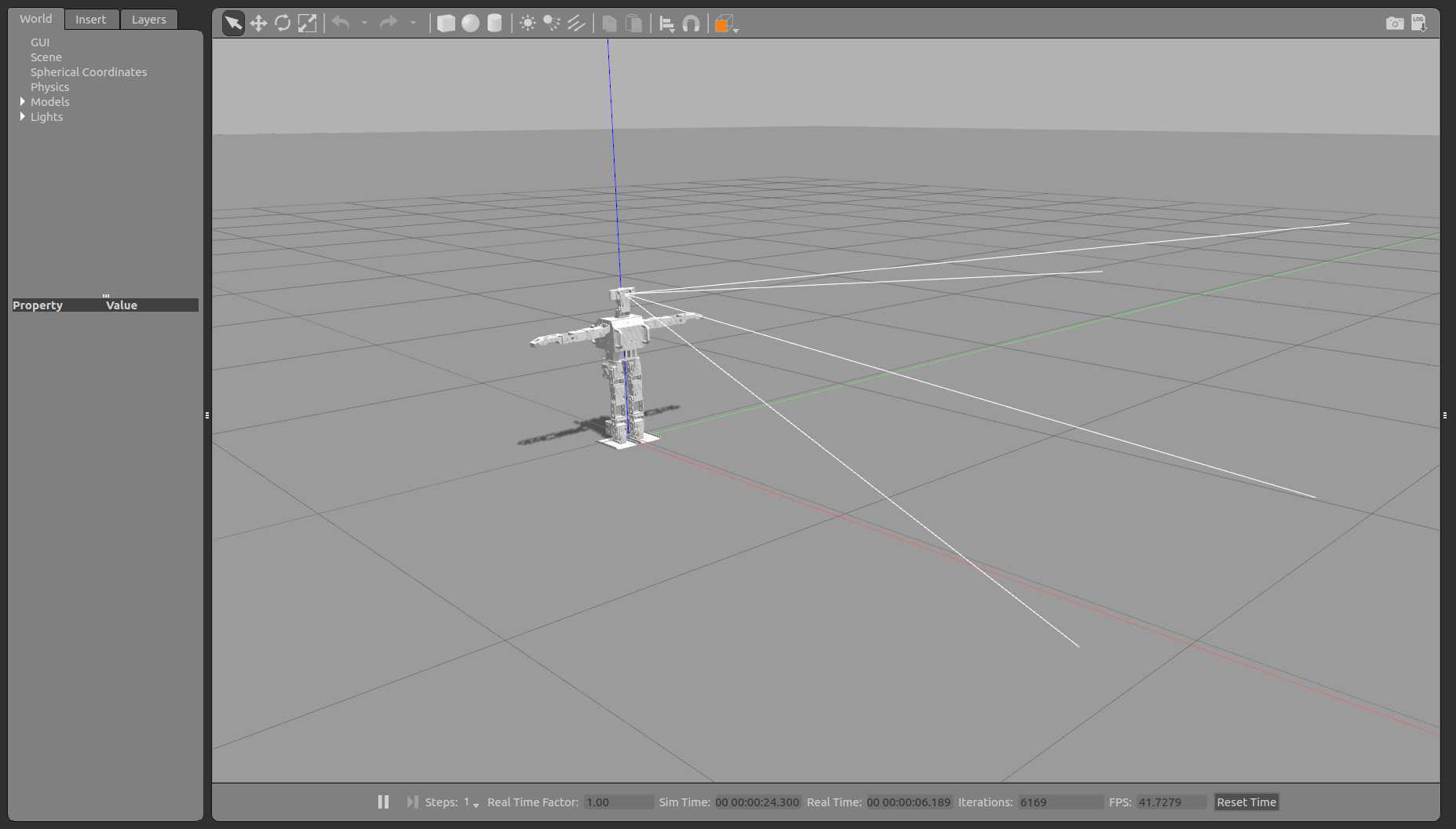
roslaunch op3_manager op3_gazebo.launch
原文:https://www.cnblogs.com/kay2018/p/12830603.html