给定一幅图像,判断出其是否存在感兴趣区域, 如果存在,则给出感兴趣区域物体的类别和位置。
根据anchor可分为anchor-based和anchor-free。
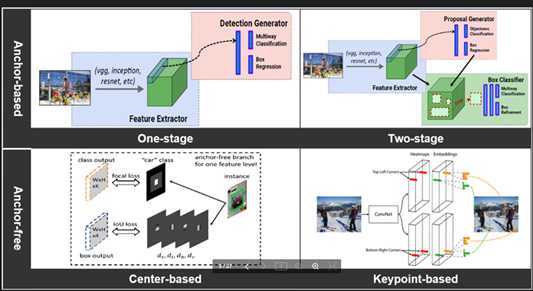
(1)anchor-based-RefineDet:
one-stage速度快但精度低,two-stage速度慢但精度高,根据分析,其实two-stage最耗时的地方时roi-pooling。于是RefineDet为了中和速度和精度,提出了一个1.5stage 的目标检测算法。
ARM与RPN类似,过滤掉背景proposal,TCN类似FPN的模块,ADM
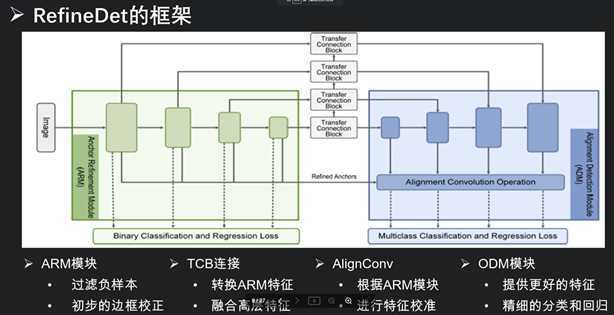
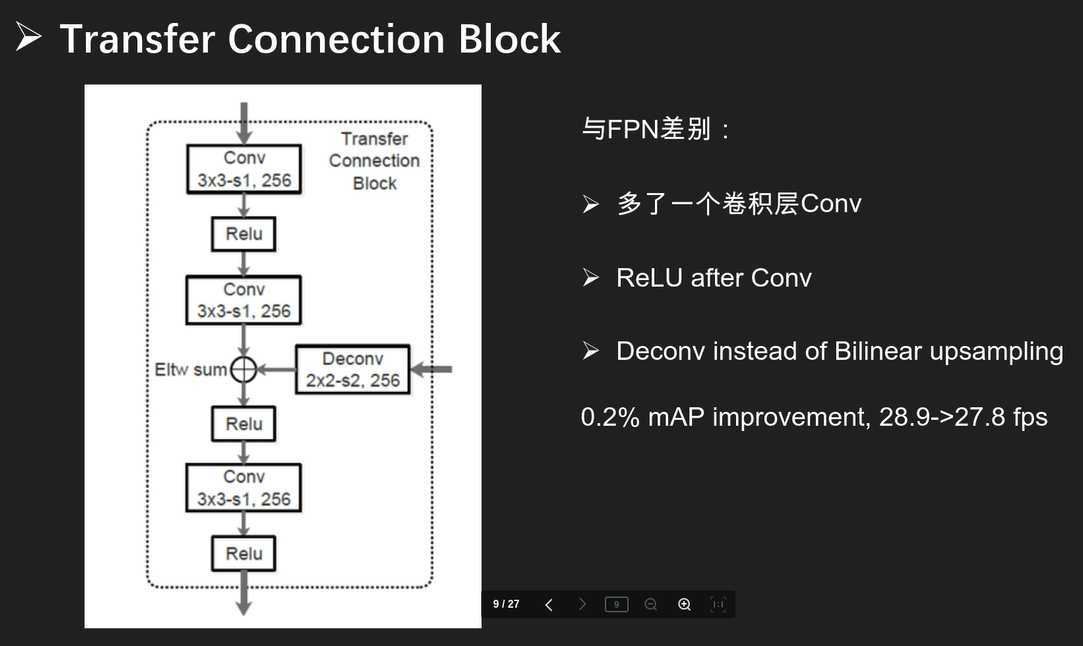
TCB模块其实类似FPN,只是稍微有所不同。
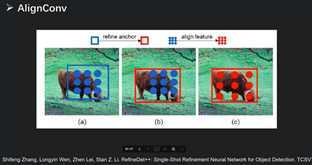
AlignConv:
(2)anchor-free思考——ATSS(Adaptive Training Sample Selection )策略:
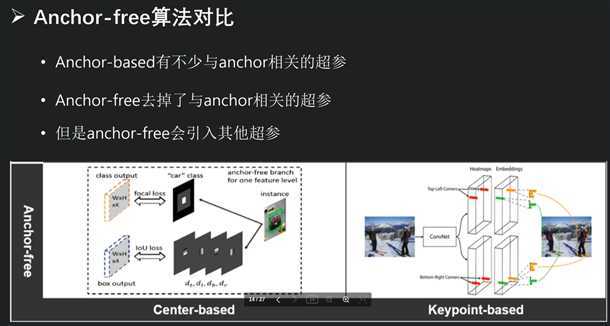
作者通过分析anchor-based和anchor-free的方法的跟别差别发现了采样对anchor-based方法的重要性。
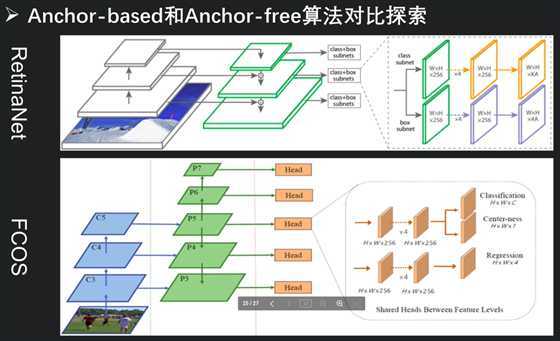
其中,作者比较了RetinaNet(anchor-based)和FCOS(anchor-free)两个方法,发现他们俩在正负样本采样的时候有区别,虽然回归的时候也有些差异,但是回归的loss对算法差异不大,因此作者基于正负样本的采样方式提出了ATSS策略。
ATSS策略思想:
每次在FPN每层根据anchor的中心点和gt的中心点的IOU的距离选取k个anchor,然后计算这些k个anchor和gt的IOU的距离的均值和方差。根据经验值选取均值和方差作为阈值进行候选,对这些anchor进行丢掉(负样本)或者保存(正样本)。
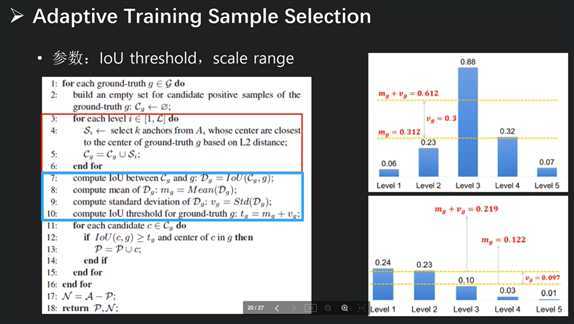
结论:对于目标检测,合理的正负样本回归其实是影响目标检测效果的根本原因,回归的时候不管是哪种回归loss其实影响不大。
Object Detection的一些进展(Valse2020.4.30)
原文:https://www.cnblogs.com/yeshengCqupt/p/12919957.html