以前一直只是泛泛的了解了下ROIAlign,最近发现了detectron2蛮适合我这个菜鸟学习的,也经过摸索在自己只能装windows10系统的菜鸟笔记本上跑通了,那就正好来好好学习下一些细节把。一直看理论总是懵懵的状态,这篇就主要记录下学习的过程,作为一个备忘,也算立功FLAG努力写清楚。
提到ROIAlign就简单回顾一下ROI Pooling原理然后分析下代码流程
在fasterrcnn中RPN网络输出的多个不同大小的roi, 然后根据featrue map(RPN和box分类回归的share_conv)输出固定大小的特征进行box的分类和回归 所有总结ROI Pooling的输入输出为:
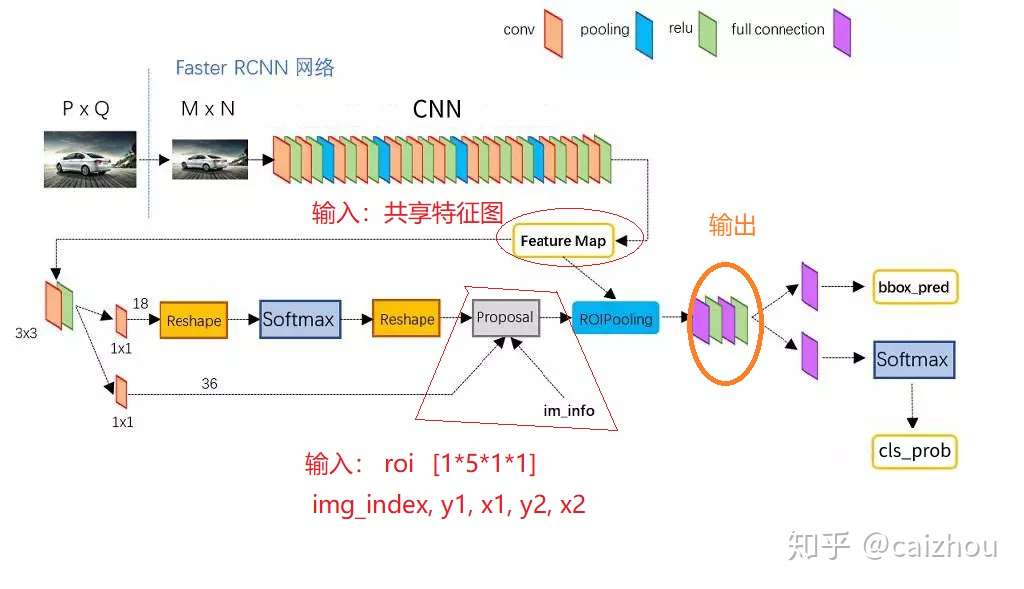
便于理解这里可以参考tensorflow roi-pooling解释,图文代码并茂。
前面知道了ROI Pooling的原理和输入输出,下面简单撸一撸代码实现的流程这里主要参考一个c++ caffe实现,也参考了csdn博客
参数:
template<typename Dtype>
void ROIPoolingLayer<Dtype>::LayerSetUp(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top)
{
pooled_height_ = roi_pool_param.pooled_h();
pooled_width_ = roi_pool_param.pooled_w();
spatial_scale_ = roi_pool_param.spatial_scale();
}template <typename Dtype> void ROIPoolingLayer<DType>::Reshape(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top)
{
channels_ = bottom[0]->channels();
height_ = bottom[0]->height();
width_ = bottom[0]->width();
// bottom[0] 为共享特征图输入
// bottom[1] 为rois
top[0]->Reshape(bottom[1]->num(), channels_, pooled_height_, pooled_width_);
// top[0]为pool过后的特征,第一维度为roi数量
max_idx_.Reshape(bottom[1]->num(). channels_, pooled_height_, pooled_width_);
// max_idx_为pool后特征中每一个值在原共享特征图上的索引,【num_rois, channels, pooled_height, pooled_width_】
}
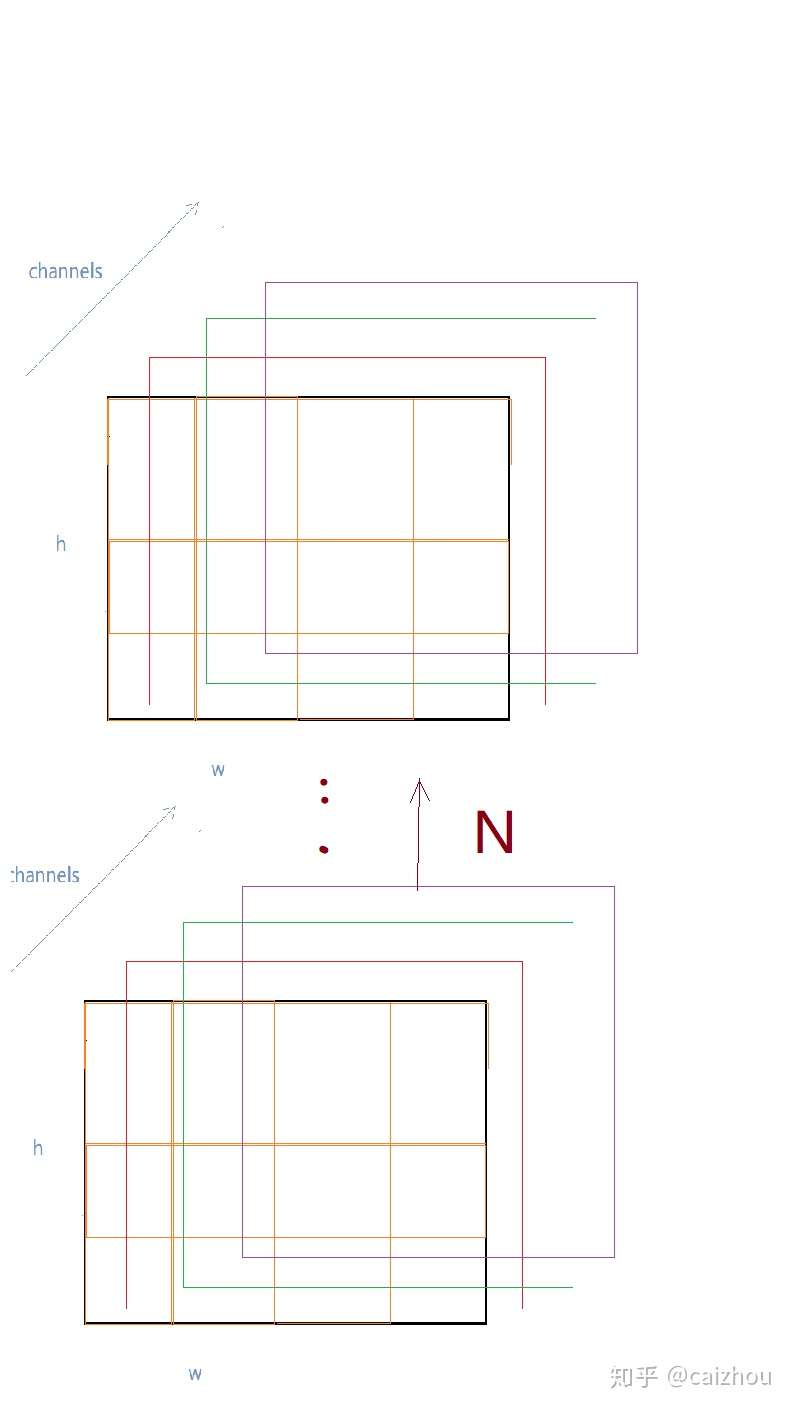 pooled输出结构示意图(勿吐槽图丑)
pooled输出结构示意图(勿吐槽图丑)
template<typename Dtype>
void ROIPoolingLayer<Dtype>::Forward_cpu(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top)
{
const Dtype* bottom_data = bottom[0]->cpu_data();// bottom_data表示共享特征图【B*C*H*W】
const Dtype* bottom_rois = bottom[1]->cpu_data();//bottom_rois表示rois信息,一共5维,第一维度
// rois在训练batch中图片索引,后四维表示rois的坐标信息 【B*5*1*1】
int num_rois = bottom[1]->num(); // rois的总数N
int batch_size = bottom[0]->num(); // batch_size表示一次训练中输入的图片数量,因为roi并不是
//都存在于同一张图片上
int top_count = top[0]->count(); // top_count表示top[0]的全部容量【N*C*H*W】
Dtype* top_data = top[0]->mutable_cpu_data(); //使用top_data指针索引top[0]
caffe_set(top_count, Dtype(-FLT_MAX), top_data); // 初始化top_data(即top[0],使其初始值为最小值
int* argmax_data = max_idx_.mutalbe_cpu_data(); //使用argmax_data指针索引max_idx_
caffe_set(top_count, -1, argmax_data);//初始化argmax_data(即max_idx_)初始值设置为-1
// top[0]和max_idx_大小都为top_cont即(N*C*H*W)如上图所示
//////////////////////////////////////////////////////////////////////////
// 下面开始进行每个roi的池化操作
///////////////////////////////////////////////////////////////////////////
for(int n=0; n<num_rois; ++n) // 第一个循环 N维度上进行遍历[batch_index, x1, y1, x2, y2]
{
// index
int roi_batch_ind = bottom_rois[0] //找到roi对应的训练图片在训练batch的索引
// x1,y1,x2,y2 round 【第一次量化】
int roi_start_w = round(bottom_rois[1]*spatial_scale_); // roi的x1(左上x坐标)在共享特征图上的位置
int roi_start_h = round(bottom_rois[2]*spatial_scale_); // y1(左上y坐标)
int roi_end_w = round(bottom_rois[3]*spatial_scale_); // x2(右下x坐标)
int roi_end_h = round(bottom_rois[4]*spatial_scale_); // y2(右下y坐标)
// check
CHECK_GE(roi_batch_ind, 0)
CHECK_LT(roi_batch_ind, batch_size)
// w, h
int roi_height = max(roi_end_h-roi_start_h+1, 1) // roi在共享特征图上的高
int roi_width = max(roi_end_w-roi_star_w+1, 1) // roi在共享特征图上的宽
// 【第二次量化】得到在roi_pool时候在高方向上划分的段数
const Dtype bin_size_h = static_cast<Dtype>(roi_height)/static_cast<Dtype>(pooled_heihgt_)
const Dtype bin_size_w = static_cast<Dtype>(roi_width)/static_cast<Dtye>(pooled_width_);
for(int c=0; c<channels_; ++c) // 第二个循环,遍历channels
{
for(int ph=0; ph<pooled_height_; ++ph) // 第三个循环, 遍历pooled_hegiht_
{
for(int pw=0; pw<pooled_width_; ++pw) // 第四个循环, 遍历pooled_width_
{
//将pooled的输出分别对应共享特征图的区域【如下图】
int hstart = static_cast<int>(floor(static_cast<Dtype>(ph)*bin_size_h));
int wstart = static_cast<int>(floor(static_cast<Dtype>(pw)*bin_size_w));
int hend = static_cast<int>(ceil(static_cast<Dtype>(ph + 1)*bin_size_h));
int wend = static_cast<int>(ceil(static_cast<Dtype>(pw + 1)*bin_size_w));
hstart = min(max(hstart + roi_start_h, 0), height_);
hend = min(max(hend + roi_start_h, 0), height_);
wstart = min(max(wstart + roi_start_w, 0), width_);
wend = min(max(wend + roi_start_w, 0), width_);
// check
bool is_empty - (hend<=hstart)||(wend<=wstart);
const int pool_index = ph*pooled_width_+pw; //找到对应pool_index
if(is_empty)
{
top_data[pool_index]=0;
argmax_data[pool_index]=-1;
}// if
for(int h=hstart; h<hend; ++h)//第五个循环
{
for(int w=wstart; w<wstart; +=w)//第六个循环
{ //找最大值
const int index = h*width_+w;
if (batch_data[index] > top_data[pool_index])
{
top_data[pool_index] = batch_data[index];//该值对应检索区域中的最大值
argmax_data[pool_index] = index;//记录该值对应的共享特征图上面的位置
}
}// 第六个循环end
} // 第五个循环end
}// 第四个循环 pool_width end
} // 第三个循环for pooled_heihgt end
batch_data += bottom[0]0>offset(0,1); //做完一个通道,将输出索引指针移动到下一个索引
top_data += top[0]->offset(0,1)
argmax_data += max_idx_.offset(0,1);
}// for 第二个循环channels_ end
bottom_rois += bottom[1]->offset(1); //处理完一个roi,接着处理下一个roi
} //for 第一个循环 num_rois end
}// 函数end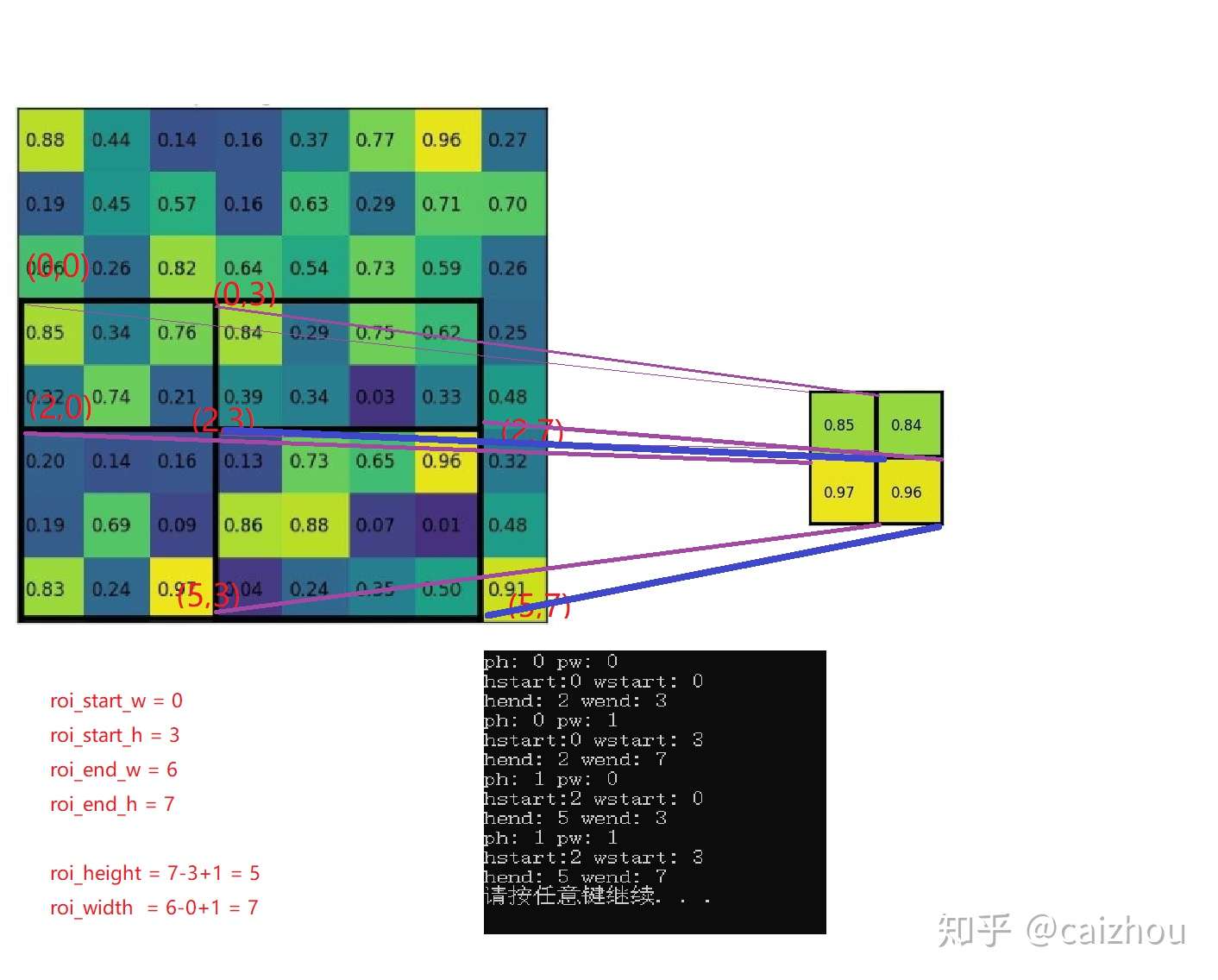 第三个和第四个循环的目的
第三个和第四个循环的目的
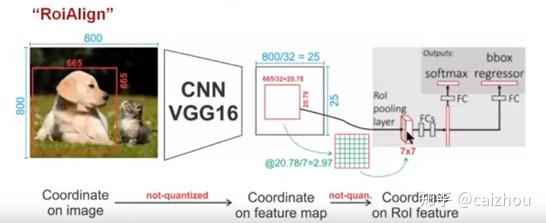
在fasterrcnn中使用了ROI Pooling,在maskRCNN中使用了ROI Align,看了好多大神都在说这个非常牛,是MaskRCNN的灵魂,而且都说了针对ROIPooling两次量化的缺点所提出的。这里也盗用两张图进行说明
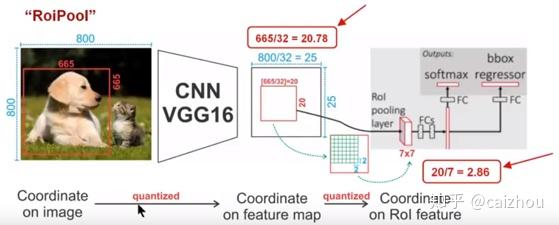
一个800x800的图片上有一个665x665大小的框,经过主干网络提取特征之后,特征图缩放不长为32,所以特征图变为25x25,而框则变为20.78x20.78,所以roi pooling将其量化为20,接下来池化7x7的大小则需要bin大小(20/7=2.86)又包含了小数,再一次量化到2,所以讲过两次量化之后候选区域就发生了很明显的偏差,在特征图0.1的误差在原图就为3.2倍,0.8的偏差在原图则有将近30个像素偏差。而对比上图ROIAlign(下图)则取消量化操作,使用双线性插值。
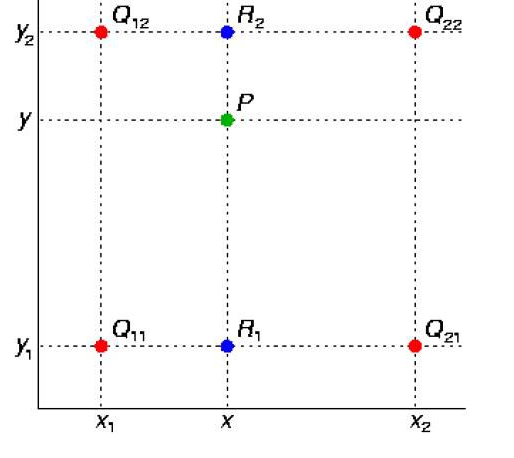
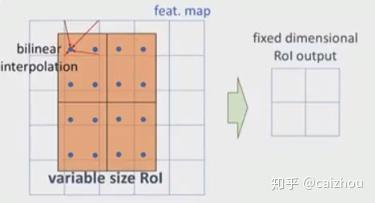
具体流程可以如下参考下图
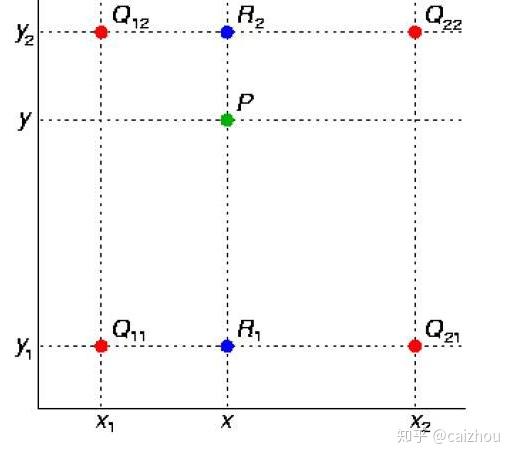
使用四个已知坐标(0,0),(0,1),(1,0),(1,1)简化上面公式:
在实际代码中核心模块对应:
int y_low = (int)y
int x_low = (int)x
y_high = y_low+1;
x_high = y_high+1;
//////////////////////
pos1 + + pos2 (x_low,y_low) (1+x_low, y_low)
- =>
pos3 + + pos4 (x_low,1+y_low) (1+x_low,1+y_low)
//////////////////////
pos1 = y_low*width+x_low;
pos2 = y_low*width+x_high;
pos3 = y_high*width+x_low;
pos3 = y_high*width+x_high;
简化公式中
w1 = (1-x)(1-y)
w2 = x (1-y)
w3 = (1-x) y
w4= x y
这是在简化y_low=0; y_hgih=1;x_low=0, x_high=1的情况下
所以在这里我们的x,y分别为:
lx= x-x_low;
ly = y-y_low
hy = 1-ly
hx = 1-lx
w1= hy*hx =>(1-x)(1-y)=>((1+x_low)-x)((1+y_low)-y)=>(1-(x-x_low))((1-(y-y_low))=>hy*hx
w2=hy*lx
w3=ly*hx
w4=lxly
代码地址在detectron2/layers/ROIAlign,首先介绍
在ROIAlign.h中定义了cpu版本的前向和后向,和cuda版本的前向和后向
at::Tensor ROIAlign_forward_cpu(const at::Tensor& input,
const at::Tensor& rois,
const float spatial_scale,
const int pooled_height,
const int pooled_width,
const int sampling_ratio,
bool aligned
)
at::Tensor ROIAlign_backward_cpu(const at::Tensor& grad,
const at::Tensor& rois,
const float spatial_scale,
const int pooled_height,
const int pooled_width,
const int batch_size,
const int channels,
const int height,
const int width,
const int sampling_ratio,
bool aligned)对cpu代码进行解析
template<typename T> void ROIAlignForward(const int nthreads,
const T* input,
const T& spatial_scale,
const int channels,
const int height,
const int width,
const int pooled_height,
const int pooled_width,
const int sampling_ratio,
const T* rois,
T* output,
bool aligned)
{
int n_rois = nthreads/channels/pooled_width/pooled_height;
//pooled输出大小为nthreads(n,c,ph,pw) 同roi pooling
// n_rois为roi的个数
for(int n=0; n<n_rois; n++)//第一个循环遍历rois
{
int index_n = n*channels*pooled_width*pooled_height; //
const T* offset_rois = rois + n*5; //如图(遍历roi)
int roi_batch_ind = offset_rois[0];// roi_pooling一样roi对应训练batch索引
T offset = aligned? (T)0.5:(T)0.0; // do not use round
// roi in conv featruemap
T roi_start_w = offset_rois[1]*spatial_scale-offset;
T roi_start_h = offset_rois[2]*spatial_scale-offset;
T roi_end_w = offset_rois[3]*spatial_scale-offset;
T roi_end_h = offset_rois[4]*spatial_scale-offset;
T roi_width = roi_end_w-roi_start_w;
T roi_height = roi_end_h-roi_start_h;
if (aligned)
{
AT_ASSERTM(roi_width >= 0 && roi_height >= 0,"ROIs in ROIAlign cannot have non-negative size!");
}
else
{ // for backward-compatibility only
roi_width = std::max(roi_width, (T)1.