SIFT(Scale Invariant Feature Transform) 由 David Lowe 于 2004 年提出。SIFT 算法在不同尺度下检测最强特征点,并给出特征点描述。由于特征点描述基于主方向与尺度信息,故可以使用描述信息对不同尺度,不同方向特征点进行比对。主要步骤如下:
1)使用不同尺度 DoG 算子在 (图像平面,尺度)空间上寻找极值;
2)使用 二次函数 极值确定特征点精确位置与尺度;
3)使用 梯度 信息确定各个特征点方向;
4)基于 特征点方向与特征点尺度 计算特征点描述信息;
1 检测尺度空间上极值
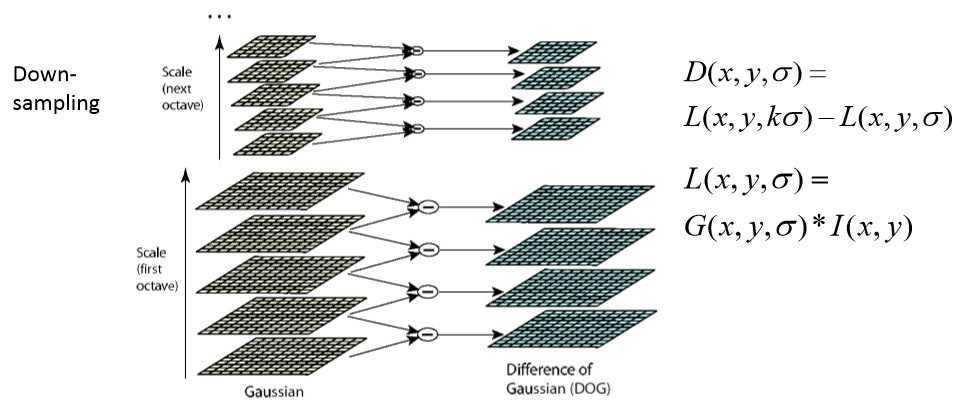
与 "Blob检测" 博文大体一致,使用不同尺度 高斯函数 对原图像卷积,再对卷积图像求差值,得到原图像不同尺度下的 DoG 响应。
将不同尺度下 DoG 排列起来即形成了一个三维函数,其因变量为:位置(x, y), 尺度  ,
, 。
。
在离散函数  上,对比每个点与周边 26 个邻接点关系,当其值均大于邻接点值或者均小于邻接点值时,确定为候选特征点。如下图:
上,对比每个点与周边 26 个邻接点关系,当其值均大于邻接点值或者均小于邻接点值时,确定为候选特征点。如下图:
以下有两点细节不太理解:
1)使用不同  高斯函数即可实现不同尺度查找,那么上图中对原图下采样是否是多余?
高斯函数即可实现不同尺度查找,那么上图中对原图下采样是否是多余?
2)已经知道在使用 Laplacian of Gaussian 检测关键点时,不同尺度高斯函数产生的响应不一致,需要使用  进行归一化处理。
进行归一化处理。
而 DoG 等价于 归一化 LoG, 推论如下:
根据 heat diffusion equation , ,
, ,
,
 。 ?
。 ?
2 提升特征点位置精度
将函数 视为连续函数,利用二阶泰勒公式可以得到特征点更精确位置与尺度,具体如下:
1)以离散情形下计算特征点位置作为起始点, 表示相对于起始点偏移量;
表示相对于起始点偏移量;
2)二阶泰勒表达式为  ;
;
3)对二阶泰勒表达式求一阶偏导并令其值为0
参考资料 Learning OpenCV 3 Adrian Kaehler & Gary Bradski
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe
原文:https://www.cnblogs.com/luofeiju/p/13123977.html