1. 图的定义与性质
(1)从任意顶点是否连通的角度,图分为:连通图和非连通图;从顶点之间的边的方向性的角度,又分为:有向图和无向图。
(2)一个连通图的连通分量是其本身,一个非连通图的连通分量是其所有极大连通子图。
2.图的存储结构
(1)*邻接矩阵:用一维数组来存储顶点信息,用二维数组存储邻接矩阵,较适用于稠密图 和 已知点和边的图;
(2)*邻接表:用一个单链表存储图中每个顶点V,再分别用链表存储与 V相邻接的所有顶点;适用于稀疏图,也方便删改图中顶点,但有时候定义比较麻烦复杂(个人感觉)。
(3) 十字链表:针对有向图,看成是有向图邻接表和逆邻接表的结合,十字链表也可以看成是邻接矩阵的链表存储结构;
(4) 邻接多重表:无向图的另一种链式存储结构,可用于边的删改。
3.图的遍历:
(1)DFS深度优先搜索:类似树的先序遍历
void DFS(Graph &G, int j)
{
visited[j] = 1;
cout<<j<<" ";
for(int i=0; i<G.Nnum; i++)
{
if(G.edges[i][j] == 1 && visited[i] == false)
{ DFS(G, i); }
}
}
(2)BFS广度优先搜索:类似树的层次遍历
void BFS(Graph &G, int j)
{//宽度优先分析
visited[j] = true;
queue<int> qu;
qu.push(j);
while(qu.size() != 0)
{
int mark = qu.front();
qu.pop();
cout<<mark<<" ";
for(int i=0; i<G.Nnum; i++)
{
if(G.edges[i][mark] == 1 && visited[i] == false)
{
visited[i] = true;
qu.push(i);
}
}
}
}
4.最小生成树
(1)普里姆算法Prim:算法核心是归并点,适用于稠密网
(2)克鲁斯卡尔算法:算法核心是归并边,适用于稀疏网
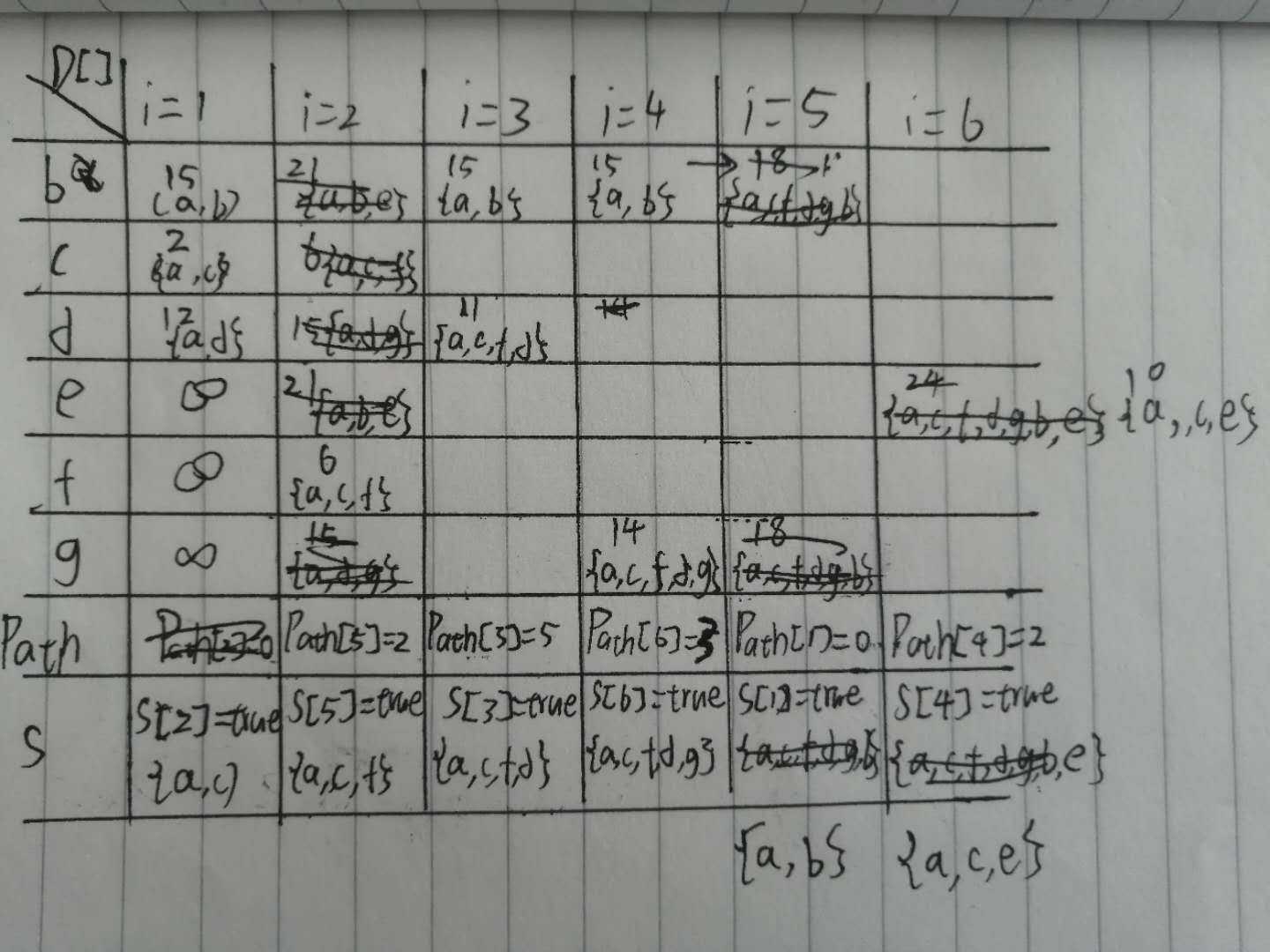
5.最短路径
原文:https://www.cnblogs.com/jospeer/p/13127150.html