目标检测任务的损失函数由Classificition Loss和Bounding Box Regeression Loss两部分构成。近几年来Bounding Box Regression Loss Function的演进过程,其演进路线是Smooth L1 Loss IoU Loss
GIoU Loss
DIoU Loss
CIoU Loss。
faster rcnn里面就是使用的这个loss:
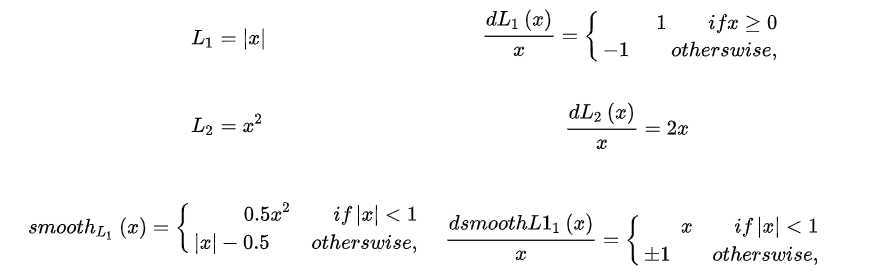
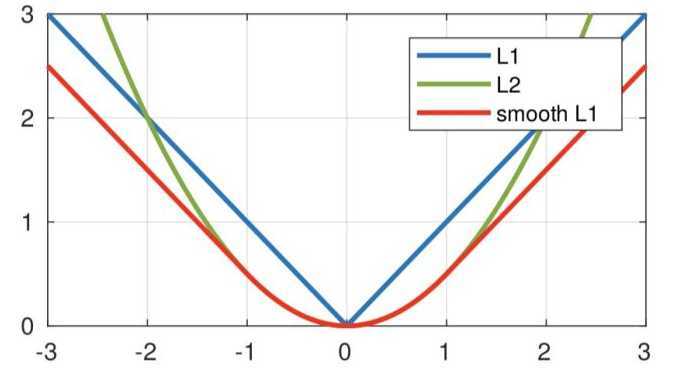
从损失函数对x的导数可知: L1损失函数对x的导数为常数,在训练后期,x很小时,如果learning rate 不变,损失函数会在稳定值附近波动,很难收敛到更高的精度。 L2 损失函数对x的导数在x值很大时,其导数也非常大,在训练初期不稳定。smoothL1完美的避开了 前两个损失的缺点。而且从图像上也能看出smooth L1更加平滑。
缺点:
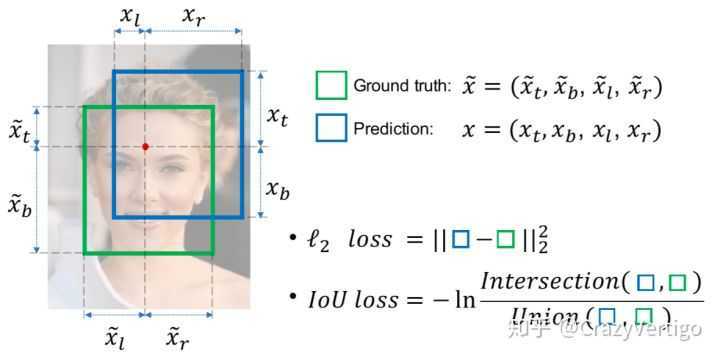
实际评价框检测的指标是使用IOU,这两者是不等价的,多个检测框可能有相同大小的Loss,但IOU可能差异很大,为了解决这个问题就引入了IOU LOSS。
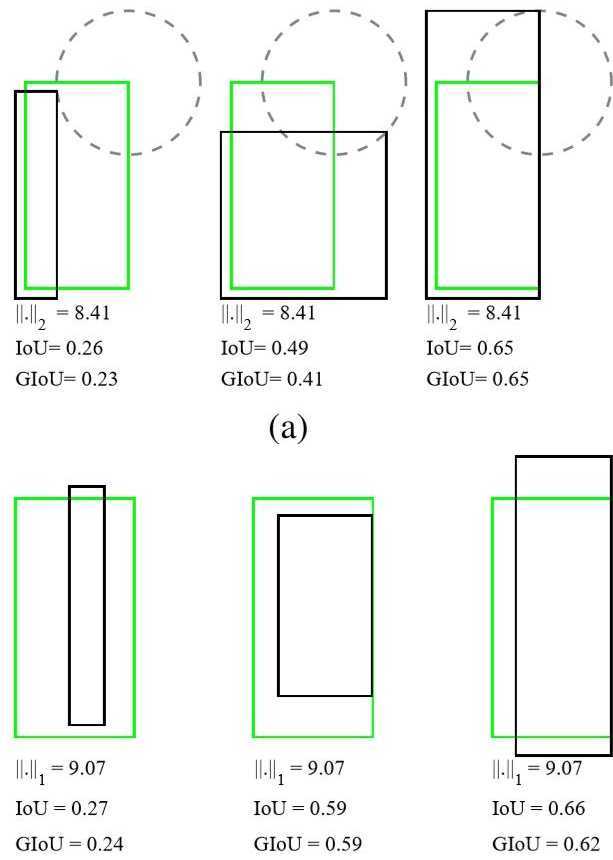
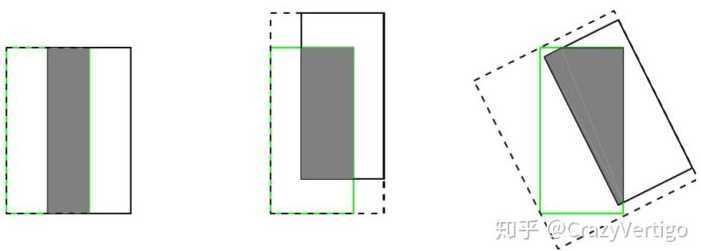
三种不同相对位置的框拥有相同的IoU=0.33值,但是拥有不同的GIoU=0.33,0.24,-0.1。当框的对齐方向更好一些时GIoU的值会更高一些。
GIoU考虑到,当检测框和真实框没有出现重叠的时候IoU的loss都是一样的,因此GIoU就加入了C检测框(C检测框是包含了检测框和真实框的最小矩形框),这样就可以解决检测框和真实框没有重叠的问题。但是当检测框和真实框之间出现包含的现象的时候GIoU就和IoU loss是同样的效果了。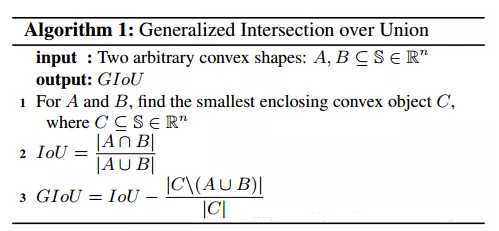
其中:C代表包围A、B的最小体积(或面积)。
性质:
1) 当IoU值为1时,GIoU 为 1,即|A U B| = |A ∩ B|;
2) Iou为0时,GIoU<=0;
3) -1<= GIoU <=1;
4) GIou <= IoU;
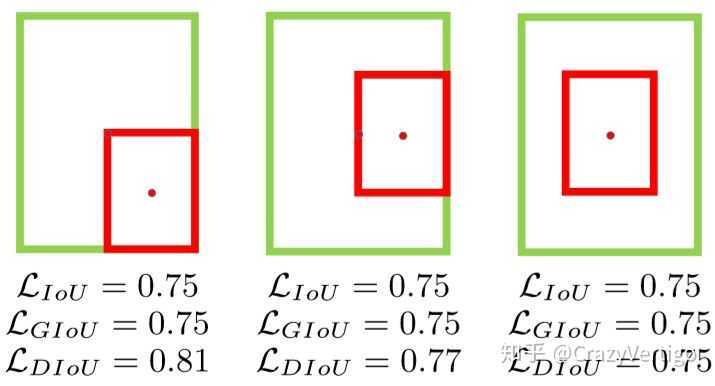
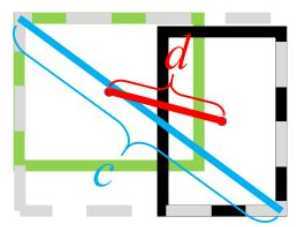
当目标框完全包裹预测框的时候,IoU和GIoU的值都一样,此时GIoU退化为IoU, 无法区分其相对位置关系;此时作者提出的DIoU因为加入了中心点归一化距离,所以可以更好地优化此类问题。

b和 代表预测框的中心点和gt框的中心点。
代表的是欧式距离,c代表包含这两个框的最小矩形的对角线长度。这样的话,对于包含这种情况,中心点的距离也成为了一个评判标准,也能有一个优化的方向。
性质:

CIoU就是在DIoU的基础上增加了检测框尺度的loss,增加了长和宽的loss,这样预测框就会更加的符合真实框。
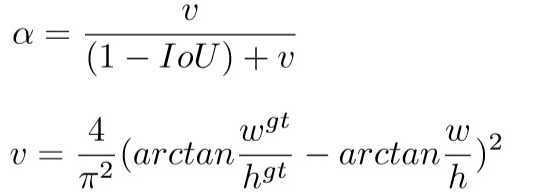
上述损失函数中,CIoU比DIoU多出了α和v这两个参数。其中α是用于平衡比例的参数。v用来衡量anchor框和目标框之间的比例一致性。 从的定义式来看,损失函数会更加倾向于往重叠区域增多的方向优化,尤其是IoU为0的情况,这满足我们的要求。同时,在进行nms阶段,一般的评判标准是IOU,这个地方作者推荐替换为DIOU,这样考虑了中心点距离这一个信息,效果又有一定的提升。
原文:https://www.cnblogs.com/super-zheng/p/13295357.html