刚刚获悉ORBSLAM3已经发表了论文并且将要开源了,找来论文看了看。
____________________________________________________________________________
摘要:
Abstract—This paper presents ORB-SLAM3, the ?rst system able to perform visual, visual-inertial and multi-map SLAM with monocular, stereo and RGB-D cameras, using pin-hole and ?sheye lens models.
The ?rst main novelty is a feature-based tightly-integrated visual-inertial SLAM system that fully relies on Maximum-aPosteriori (MAP) estimation, even during the IMU initialization phase. The result is a system that operates robustly in real time, in small and large, indoor and outdoor environments, and is 2 to 5 times more accurate than previous approaches.
The second main novelty is a multiple map system that relies on a new place recognition method with improved recall. Thanks to it, ORB-SLAM3 is able to survive to long periods of poor visual information: when it gets lost, it starts a new map that will be seamlessly merged with previous maps when revisiting mapped areas. Compared with visual odometry systems that only use information from the last few seconds, ORB-SLAM3 is the ?rst system able to reuse in all the algorithm stages all previousinformation.Thisallowstoincludeinbundleadjustment co-visible keyframes, that provide high parallax observations boosting accuracy, even if they are widely separated in time or if they come from a previous mapping session.
Our experiments show that, in all sensor con?gurations, ORBSLAM3isasrobustasthebestsystemsavailableintheliterature, and signi?cantly more accurate. Notably, our stereo-inertial SLAM achieves an average accuracy of 3.6cm on the EuRoC drone and 9mm under quick hand-held motions in the room of TUM-VI dataset, a setting representative of AR/VR scenarios. For the bene?t of the community we make public the source code.
——————————————————————————
orbslam3是第一个能够执行视觉、视觉惯性和多地图重击的系统,这次它的新增元素有下面这几个:
1.加入了鱼眼摄像头。
2.加入了imu
3.加入了多地图系统,在ORBslam2中如果图像跟丢,那么必须回到原来的地方进行重定位,才能继续跟踪,而在新的ORBslam3中,如果跟丢,就会新开一个地图,继续跟踪,当回到以前走过的地方,他会合并两个地图。还有在所有算法阶段都可以重用以前的信息。
精度:EuRoC :3.6cm ; TUM-VI dataset : 9mm
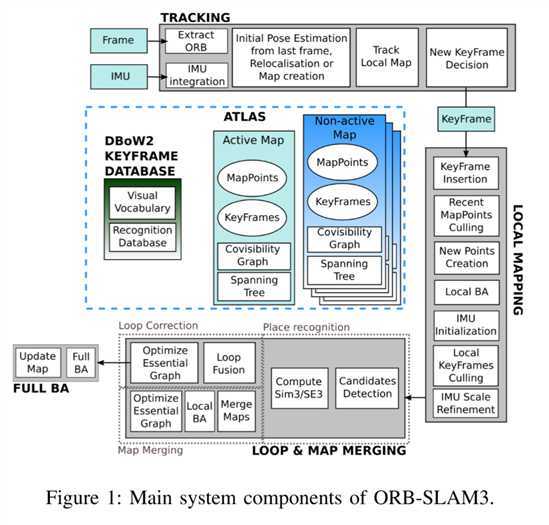
框架长这样
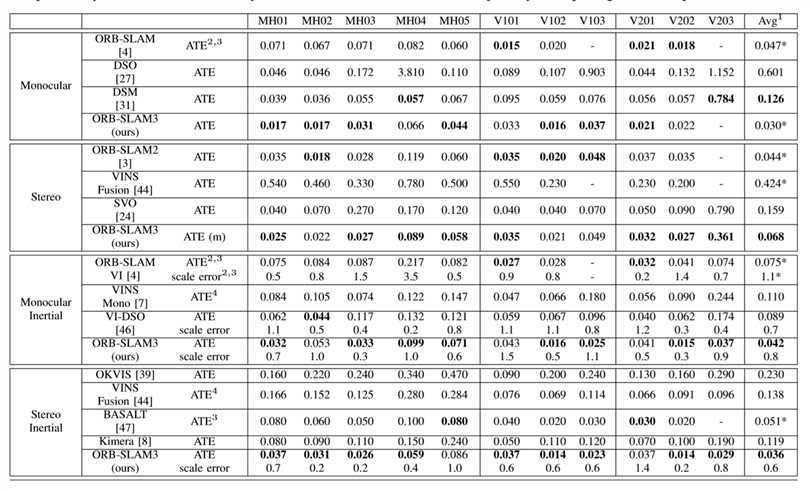
对比效果:
demo参考:
原文:https://www.cnblogs.com/polipolu/p/13378834.html