Grab算法部分:
import cv2 as cv import numpy as np # 鼠标反馈 得到前景矩形起始点,终止点,宽高 def on_mouse(event, x, y, flag, param): global rect global leftButtonDown global leftButtonUp if event == cv.EVENT_LBUTTONDOWN: rect[0] = x rect[2] = x rect[1] = y rect[3] = y leftButtonDown = True leftButtonUp = False if event == cv.EVENT_MOUSEMOVE: if leftButtonDown and not leftButtonUp: rect[2] = x rect[3] = y if event == cv.EVENT_LBUTTONUP: if leftButtonDown and not leftButtonUp: x_min = min(rect[0], rect[2]) y_min = min(rect[1], rect[3]) x_max = max(rect[0], rect[2]) y_max = max(rect[1], rect[3]) rect[0] = x_min rect[1] = y_min rect[2] = x_max rect[3] = y_max leftButtonUp = True leftButtonDown = False img = cv.imread(‘screenshot.png.jpg‘) mask = np.zeros(img.shape[:2], np.uint8) bgdModel = np.zeros((1, 65), np.float64) fgdModel = np.zeros((1, 65), np.float64) rect = [0, 0, 0, 0] leftButtonUp = True leftButtonDown = False cv.namedWindow("img") cv.setMouseCallback("img", on_mouse) cv.imshow("img", img) # 实时画出前景矩形,左键放开即开始分离前景 while cv.waitKey(2) == -1: if leftButtonDown and not leftButtonUp: img_copy = img.copy() cv.rectangle(img_copy, (rect[0], rect[1]), (rect[0] + rect[2], rect[1] + rect[3]), (0, 255, 0), 2) cv.imshow("img", img_copy) if not leftButtonDown and leftButtonUp and rect[0] != 0 and rect[1] != 0: rect_copy = tuple(rect.copy()) print(rect_copy) rect = [0, 0, 0, 0] cv.grabCut(img, mask, rect_copy, bgdModel, fgdModel, 5, cv.GC_INIT_WITH_RECT) # 背景设为0,与原图相乘,则背景为黑色 mask_two = np.where((mask == 2) | (mask == 0), 0, 1).astype(‘uint8‘) img_show = img * mask_two[:, :, np.newaxis] cv.imshow("grabcut", img_show) cv.waitKey() cv.destroyAllWindows()
分水岭算法:
主要对比了一下案例和网络上另一种用法:
import cv2 as cv import numpy as np from matplotlib import pyplot as plt src = cv.imread("coins.png") img = src.copy() gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY) ret, thresh = cv.threshold(gray, 127, 255, cv.THRESH_BINARY_INV + cv.THRESH_OTSU) # 开运算 kernel = np.ones((3, 3), np.uint8) opening = cv.morphologyEx(thresh, cv.MORPH_OPEN, kernel, iterations=2) # 第二次膨胀 sure_bg = cv.dilate(opening, kernel, iterations=3) # 距离变换 dist_transform = cv.distanceTransform(opening, cv.DIST_L2, 5) _, sure_fg = cv.threshold(dist_transform, 0.7 * dist_transform.max(), 255, 0) sure_fg = np.uint8(sure_fg) # 边界未知区域 unknown = cv.subtract(sure_bg, sure_fg) # 标记(会把背景标为0,所以整体加1) _, markers = cv.connectedComponents(sure_fg) markers = markers + 1 # 未知区域为0 markers[unknown == 255] = 0 plt.subplot(243), plt.imshow(markers) # 分水岭 markers = cv.watershed(img, markers) watershed = cv.convertScaleAbs(markers) plt.subplot(244), plt.imshow(watershed) plt.subplot(241), plt.imshow(img) # 生成随机颜色 colorTab = np.zeros((np.max(markers) + 1, 3)) # 生成0~255之间的随机数 for i in range(len(colorTab)): aa = np.random.uniform(0, 255) bb = np.random.uniform(0, 255) cc = np.random.uniform(0, 255) colorTab[i] = np.array([aa, bb, cc], np.uint8) bgrImage = np.zeros(img.shape, np.uint8) # 遍历marks每一个元素值,对每一个区域进行颜色填充 for i in range(markers.shape[0]): for j in range(markers.shape[1]): # index值一样的像素表示在一个区域 index = markers[i][j] # 判断是不是区域与区域之间的分界,如果是边界(-1),则使用白色显示 if index == -1: img[i][j] = np.array([255, 255, 255]) else: img[i][j] = colorTab[index] plt.subplot(242), plt.imshow(img) ################################# # canny边缘检测 函数返回一副二值图,其中包含检测出的边缘。 canny = cv.Canny(gray, 80, 150) # 寻找图像轮廓 返回修改后的图像 图像的轮廓 以及它们的层次 contours, hierarchy = cv.findContours(canny, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE) # 32位有符号整数类型, marks = np.zeros(img.shape[:2], np.int32) # 轮廓颜色 compCount = 0 index = 0 # 绘制每一个轮廓 for index in range(len(contours)): # 对marks进行标记,对不同区域的轮廓使用不同的亮度绘制,相当于设置注水点,有多少个轮廓,就有多少个轮廓 # 图像上不同线条的灰度值是不同的,底部略暗,越往上灰度越高 marks = cv.drawContours(marks, contours, index, (index, index, index), 1, 8, hierarchy) marks_copy = cv.convertScaleAbs(marks.copy()) plt.subplot(247), plt.imshow(marks_copy) # 使用分水岭算法 marks = cv.watershed(src, marks) afterWatershed = cv.convertScaleAbs(marks) plt.subplot(248), plt.imshow(afterWatershed) # 生成随机颜色 colorTab = np.zeros((np.max(marks) + 1, 3)) # 生成0~255之间的随机数 for i in range(len(colorTab)): aa = np.random.uniform(0, 255) bb = np.random.uniform(0, 255) cc = np.random.uniform(0, 255) colorTab[i] = np.array([aa, bb, cc], np.uint8) bgrImage = np.zeros(img.shape, np.uint8) # 遍历marks每一个元素值,对每一个区域进行颜色填充 for i in range(marks.shape[0]): for j in range(marks.shape[1]): # index值一样的像素表示在一个区域 index = marks[i][j] # 判断是不是区域与区域之间的分界,如果是边界(-1),则使用白色显示 if index == -1: bgrImage[i][j] = np.array([255, 255, 255]) else: bgrImage[i][j] = colorTab[index] plt.subplot(246), plt.imshow(bgrImage) plt.show() cv.waitKey(0) cv.destroyAllWindows()
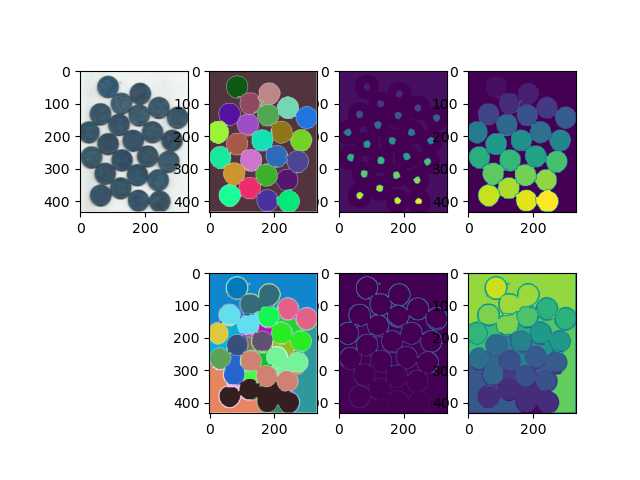
第二列是最终成图,第三列是预处理的markers,第四列是分水岭算法处理后的markers
第一种处理方法的步骤:二值化 => 开运算 => 膨胀 => 距离转换 => 找出位置区域 => 标记区域
第一种处理方法的步骤:canny => 标记轮廓
我们会发现两种思路是完全不同的,第一种重点是圆心的‘水’冲入‘山谷’中,第二种则相反
那么我们会怀疑,第二种既然是边缘‘水’泛滥到圆心,为何还会存在边缘分界呢?
其实是Canny算法将边缘大部分用两条曲线来描述,两股‘水’冲在一起形成分界,但也可看出,Canny效果不好的时候(即只有一条描述边缘),就会在局部形成大面积的泛滥,是极为不理想的效果。(最后一张图下方蓝色区域)
真正运用时,个人认为第一种明显更好,真正做到将每个物体分隔开,而第二种,会发现,如果出现物体粘连,并不能很好地分隔物体(其实没有用好分水岭)。
opencv learning_three ---- 图像分割
原文:https://www.cnblogs.com/zoe1230/p/13538850.html