推公式的话从坐标旋转开始推,容易理解,又容易推导。
1、坐标系中点的旋转的旋转矩阵
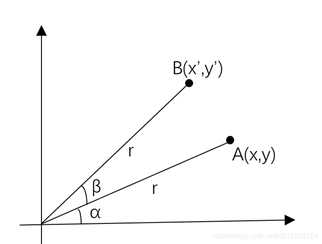
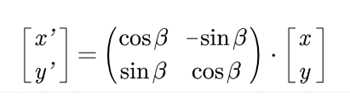
x‘=rcos(α+β) = r(cosαcosβ-sinαsinβ) = xcosβ-ysinβ
y‘=rsin(α+β) = r(sinαcosβ+cosαsinβ) = xsinβ+ycosβ
也就是
2、坐标系旋转的旋转矩阵
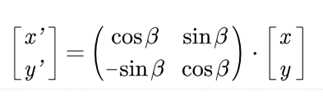
1和2的区别就在于:1是一个点的旋转,坐标系没动,得到的是动的点在原来坐标系下相对原来点的矩阵表示,2是坐标系的旋转,点是不动的,得到的是不动的点在动了的坐标系下的表示。
点旋转β相当于坐标系旋转了-β。所以我可以直接在1的基础上,把角度反转,就成了坐标系的旋转。
原文:https://www.cnblogs.com/QuincyYi/p/13734495.html